Hi Community members,
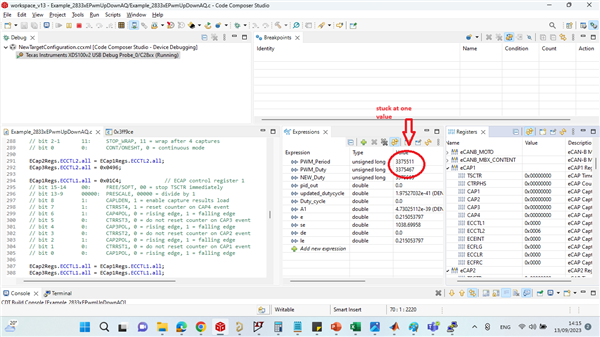
I would like to ask about the continuous / one shot mode in Ecap module. My code for capturing the pulse works somehow but sometimes it creates an issue for capturing the signals when I switched on the pulse signal from the function generator or any other systems generating PWM pulses. It seems like that it misses the rising / falling edges on several iterations during capture and the output either goes to constant low or high. Therefore, the systems doesn't recognize the pulse signal edges either it is being closed / open. Remember the coming/input signal is a continuous pulse that is being fed into eCapture mode. Changing one shot to continuous mode or vice versa can make a difference???
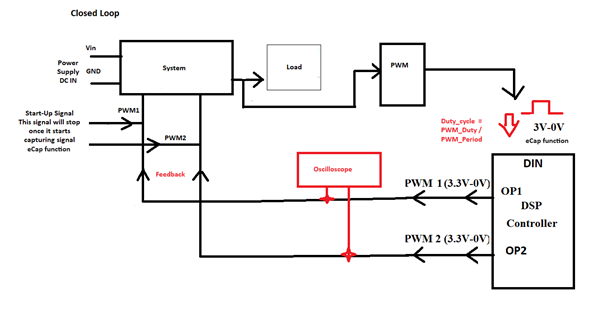
The system I am working is shared in block diagram:
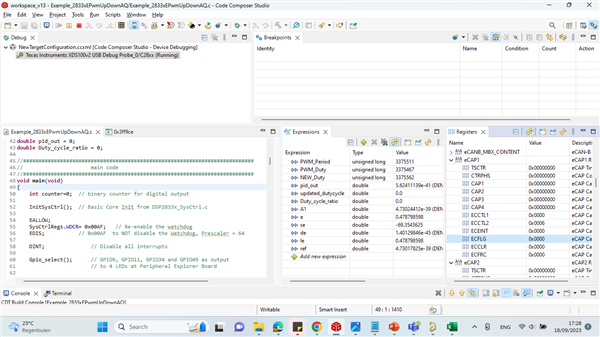
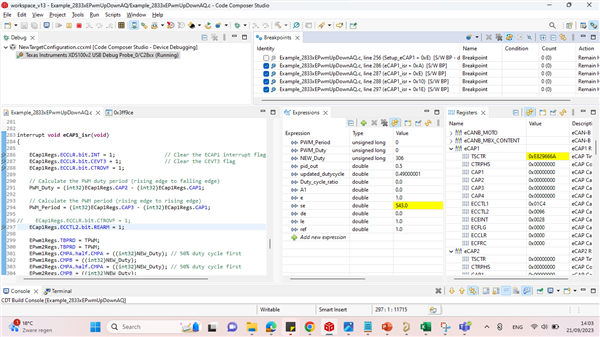
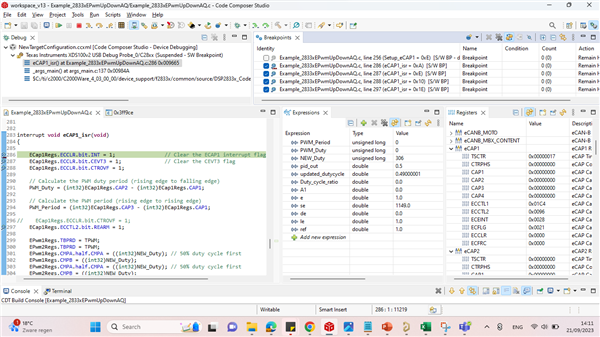
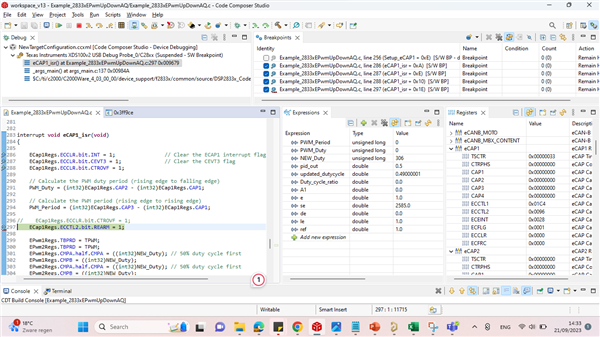
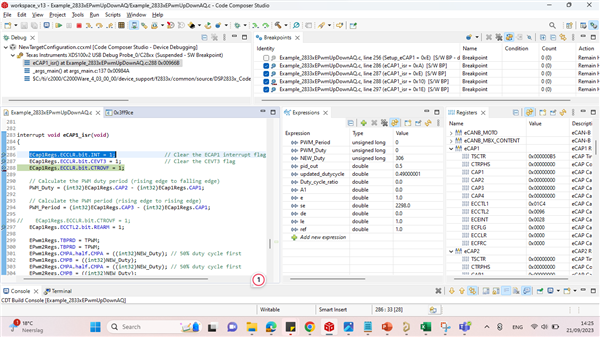
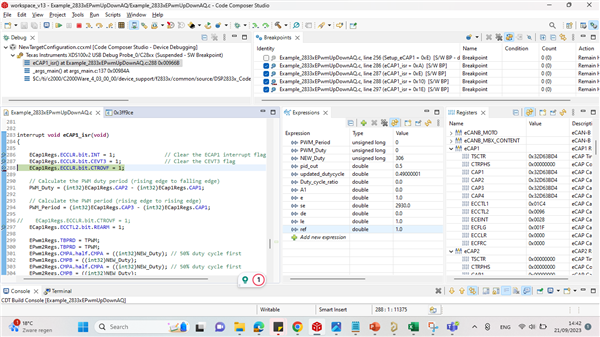
The code is attached here:
Please suggest accordingly.
Thanks
Regards
Arsalan