Part Number: LAUNCHXL-F28379D
Other Parts Discussed in Thread: SYSCONFIG
Hello,
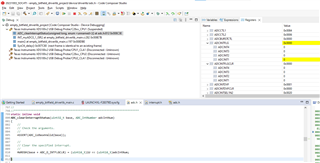
I use the ADCA on the 379D:
- Tsample=75ns
- Tconversion=285ns
I only use the SOC0 module.

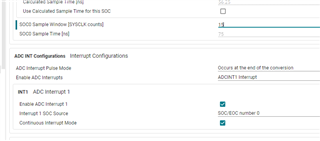
The trigger is sofware only, but I define INT1 pulse as trigger:

So, after a first software request, I expect that the ADC is in a free run mode.
Every thing is OK till the content of the interruption is less than Tsample+Tconversion.
But if it is not the case, I thought that I could use the continue mode:
- the interrupt pulse is generated before I clear the Flag
- the flag is cleared at the end of the interrupt
- the flag is set in the same time as the next interrupt pulse

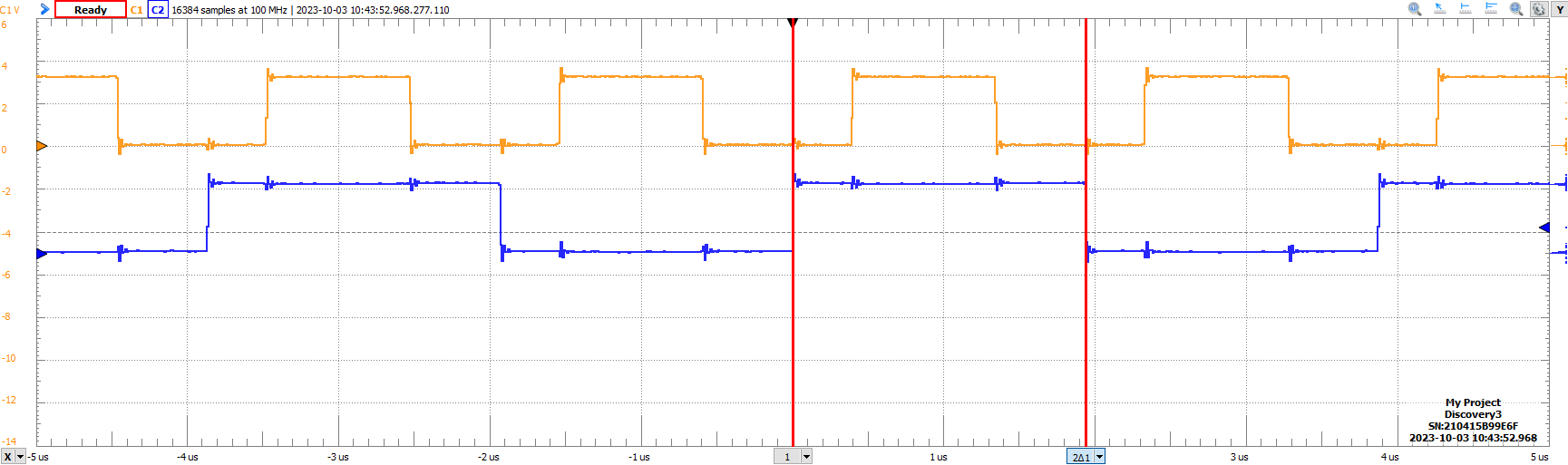
By this way, I hoped that there would be a "free" time, between 2 interrupts.
But It seems not.
When debugging the project, it seem that, in the continue mode, my demand of clearing the flag is rejected.


Does anybody know if the continue mode consists of not never reseting the Flag ?
If yes, what is the purpose of this mode ? (I will never get out of the interrupt)
Thank you for your help ?