Part Number: TMS320F28065
Other Parts Discussed in Thread: CONTROLSUITE
Hi forum,
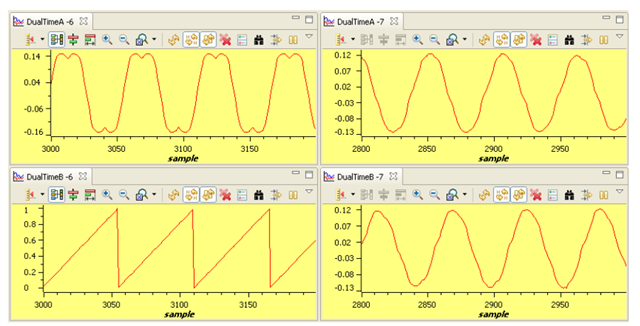
I going to drive a PMSM motor with foc algorithm. I get started with controlSUITE\development_kits\HVMotorCtrl+PfcKit_v2.1\HVPM_Sensorless_2833x project. In the application Level 2b (ajusting PI limits), I must find the maximum values of VqTesting and VdTesting.the problem which I have faced is that the waveforms of the currents are not alike. one of them has got more distortion. since the amplitude of them are equal I guess the current sensing circuit is fine. could please tell me why these two waveform are exactly the same?
thanks in advance