Part Number: LAUNCHXL-F2800137
Other Parts Discussed in Thread: BOOSTXL-DRV8323RH, TMS320F2800132, SYSCONFIG
Hello TI experts,
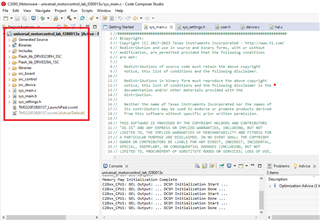
I'm running Universal Motor Control Lab 1 and following the tutorial on below page:
https://www.ti.com/video/series/motor-control-SDK-universal-project-and-lab.html
I'm using LaunchXL-F2800137 and boostxl-DRV8323RH kit to run the BLDC motor with sensorless FOC method.
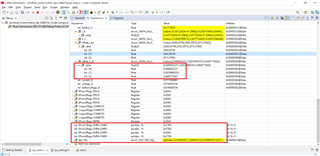
In the expressions window, I'm getting an error under systemVars.fastype "member 'fastType' not found at (systemVars).fastType". Screenshot is attached.
I'm using motor control sdk version 5_00_00_00.
When I change the variable "flagEnableRunAndIdentify" from 0 to 1, nothing happens. Instead, the variable changes value to 0 again. I'm expecting PWM output to be at 50% at this stage according to lab 1.
Could you please advise on this issue? 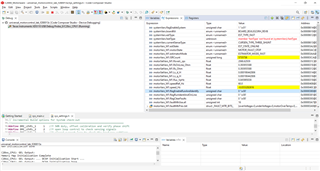
Thanks.