Other Parts Discussed in Thread: C2000WARE
I am trying to replicate the SPI driver's that are given in the Application note of HI-3593.
ap-southeast-1-02900067-inspect.menlosecurity.com/.../
The driver example is written for a different controller(MC9S12XD)
I am trying to replicate two functions R_Register() and W_CommandValue():
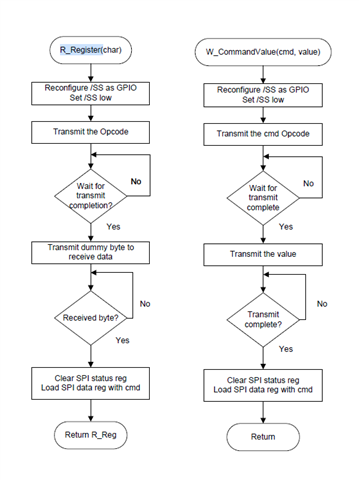
This is the code in the app note for the two functions:
/* ------------------------------------------------------------------
/ Read HI-3110 Register Read Function
/ ------------------------------------------------------------------
Argument(s): Register to read
Return: 8-bit Register Value
*/
unsigned char R_Register(char Reg)
{
unsigned char R_Reg;
SPI0CR1 = SPI0CR1 & ~SPI0CR1_SSOE_MASK; // disable auto /SS output, reset /SS Output Enable
SPI0CR2 = SPI0CR2 & ~SPI0CR2_MODFEN_MASK; // disable auto /SS output, reset SPI0 Mode Fault
SPI0_nSS = 0; // assert the SPI0 /SS strobe
R_Reg = txrx8bits(Reg, 1); // send op code (ignore returned data byte)
R_Reg = txrx8bits(0x00, 1); // send dummy data / receive Status Reg byte
SPI0_nSS = 1; // negate the SPI0 /SS strobe
SPI0CR1 = SPI0CR1 | SPI0CR1_SSOE_MASK; // enable auto /SS output, set /SS Output Enable
SPI0CR2 = SPI0CR2 | SPI0CR2_MODFEN_MASK; // enable auto /SS output, set SPI0 Mode Fault
return R_Reg;
}
// Write SPI Command with a Value to HI-3593
void W_CommandValue(uint8 cmd, uint8 value)
{
uint8 dummy;
SPI0CR1 = SPI0CR1 & ~SPI0CR1_SSOE_MASK; // disable auto /SS output, reset /SS Output
SPI0CR2 = SPI0CR2 & ~SPI0CR2_MODFEN_MASK; // disable auto /SS output, reset SPI0 Mode
SPI0_nSS = 0; // assert the SPI0 /SS strobe
dummy = SPI0SR; // clear SPI status register
SPI0DR = cmd; // SPI command
while (!SPI0SR_SPIF)
;
dummy = SPI0DR; // read Rx data in Data Reg to reset SPIF
dummy = SPI0SR; // clear SPI status register
SPI0DR = value; // Reset values
while (!SPI0SR_SPIF)
;
dummy = SPI0DR; // read Rx data in Data Reg to reset SPIF
SPI0_nSS = 1; // negate the SPI0 /SS strobe
SPI0CR1 = SPI0CR1 | SPI0CR1_SSOE_MASK; // enable auto /SS output, set /SS Output Enable
SPI0CR2 = SPI0CR2 | SPI0CR2_MODFEN_MASK; // enable auto /SS output, set SPI0 Mode Default
}
And these are my equivallent functions:
void W_CommandValue(uint16_t cmd, uint16_t value)
{
//Pull the cs pin to low.
GPIO_writePin(SPIA_CS_PIN, 0);
//Wait for 100 us.
DEVICE_DELAY_US(100);
//Read the dummy data.
SPI_readDataNonBlocking(A429_SPI);
//Wait for 100 us.
DEVICE_DELAY_US(100);
//Write the command.
SPI_writeDataNonBlocking(A429_SPI, cmd);
//Wait for 100 us.
DEVICE_DELAY_US(100);
//Read the dummy data.
SPI_readDataNonBlocking(A429_SPI);
//Wait for 100 us.
DEVICE_DELAY_US(100);
//Write the value.
SPI_writeDataNonBlocking(A429_SPI, value);
//wait 100 us.
DEVICE_DELAY_US(100);
//Read the dummy data.
SPI_readDataNonBlocking(A429_SPI);
//wait 100 us.
DEVICE_DELAY_US(100);
//Pull the cs pin to high.
GPIO_writePin(SPIA_CS_PIN, 1);
//wait 100 us.
DEVICE_DELAY_US(100);
}
uint16_t R_Register(uint16_t cmd)
{
uint16_t value = 0;
//Pull the cs pin to low.
GPIO_writePin(SPIA_CS_PIN, 0);
//Wait for 100 us.
DEVICE_DELAY_US(100);
//Write the command.
SPI_writeDataNonBlocking(A429_SPI, cmd);
//Wait for 100 us.
DEVICE_DELAY_US(100);
//Read the dummy byte.
SPI_readDataNonBlocking(A429_SPI);
//Wait for 100 us.
DEVICE_DELAY_US(100);
//Transmit dummy data.z
SPI_writeDataNonBlocking(A429_SPI, 0x00);
//Wait for 100 us.
DEVICE_DELAY_US(100);
//Read the received byte.
value = SPI_readDataNonBlocking(A429_SPI);
//Wait for 100 us.
DEVICE_DELAY_US(100);
//Pull the cs pin to high.
GPIO_writePin(SPIA_CS_PIN, 1);
return value;
}
But i am not able to communicate properly.
I tested the two functions like this:
void initHI3593()
{
//Give raising edge to HI-3593 to do a hardware reset.
GPIO_writePin(A429_CA_RESET, 0);
DEVICE_DELAY_US(100);
GPIO_writePin(A429_CA_RESET, 1);
//Write to ACLK Division Register(0x1400)
DEVICE_DELAY_US(100);
W_CommandValue(0x3800, 0x1400);
DEVICE_DELAY_US(100);
testVar = R_Register(0xD400);
}
The value of testVar should be 0x14, but i get 0x00.
Any sugesstions as to what is going wrong?