


Part Number: TMS320F28027
Other Parts Discussed in Thread: MOTORWARE
Hi Team,
Here are two issues from the customer may need your help:
E:\ti\motorware\motorware_1_01_00_18\sw\solutions\instaspin_foc\boards\boostxldrv8305_revA\f28x\f2802xF\projects\ccs \proj_lab11a
1. Where is the alignment current be set at the beginning of the motor?
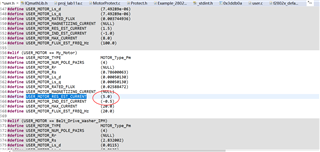
Is it this variable? Or other variable in user.h?
2. Where to set the speed of switching from open loop to closed loop?
--
Thanks & Regards
Yale
