


Part Number: TMS320F28388D
Hi Team,
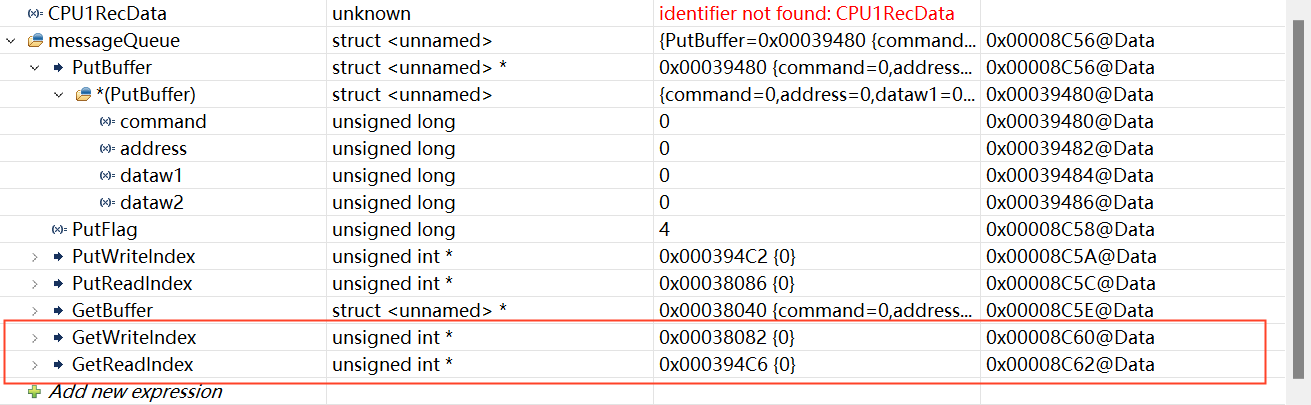
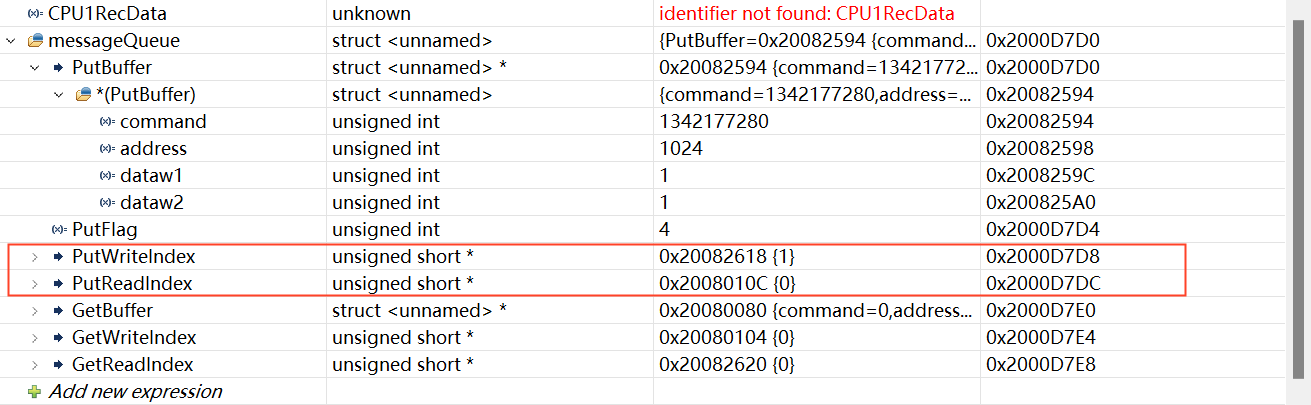
1) CPU1 can enter an IPC interrupt when CM sends data to CPU1 through the message queue when communicating between CPU1 and CM using IPC message queues in customer-built project code. however, the GetWriteIndex for CPU1 is not updated:
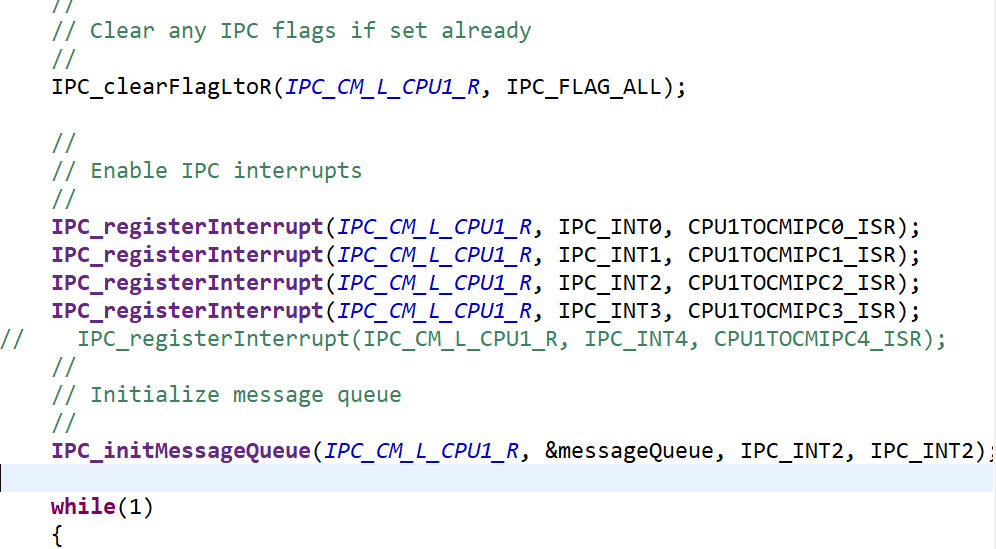
CPU1:
CM:
The CPU1 codes are as follows:
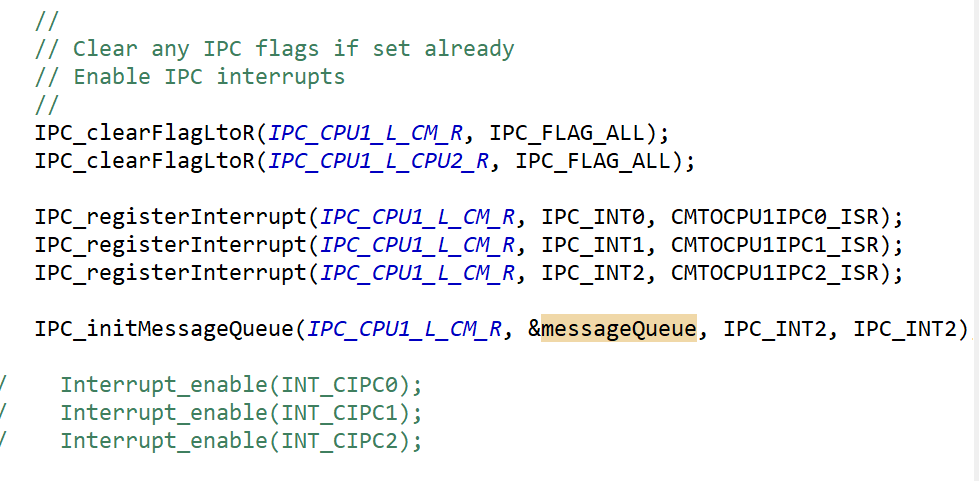
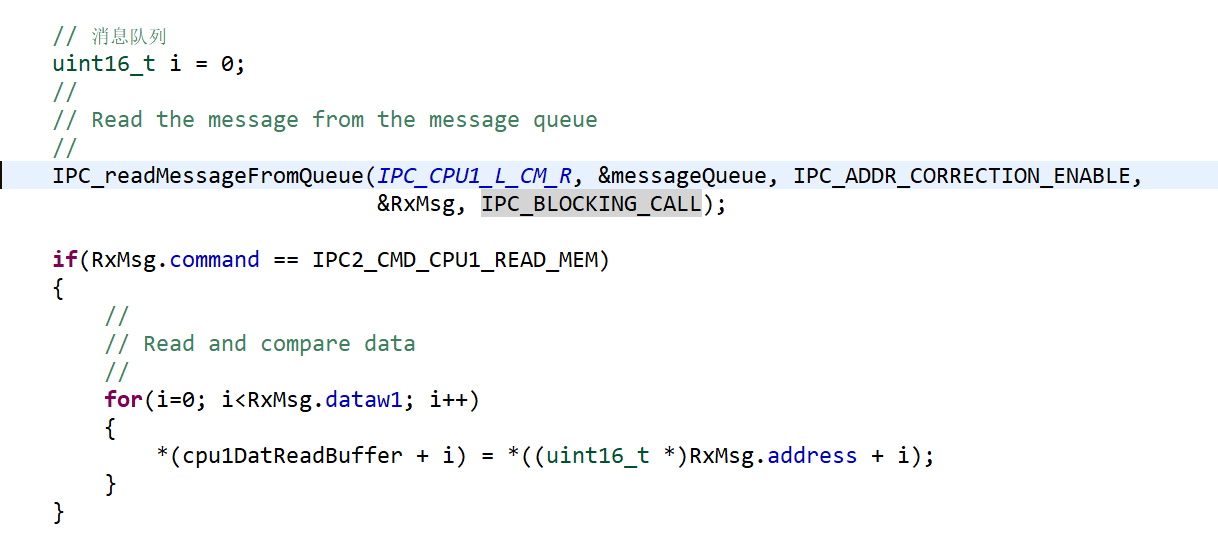
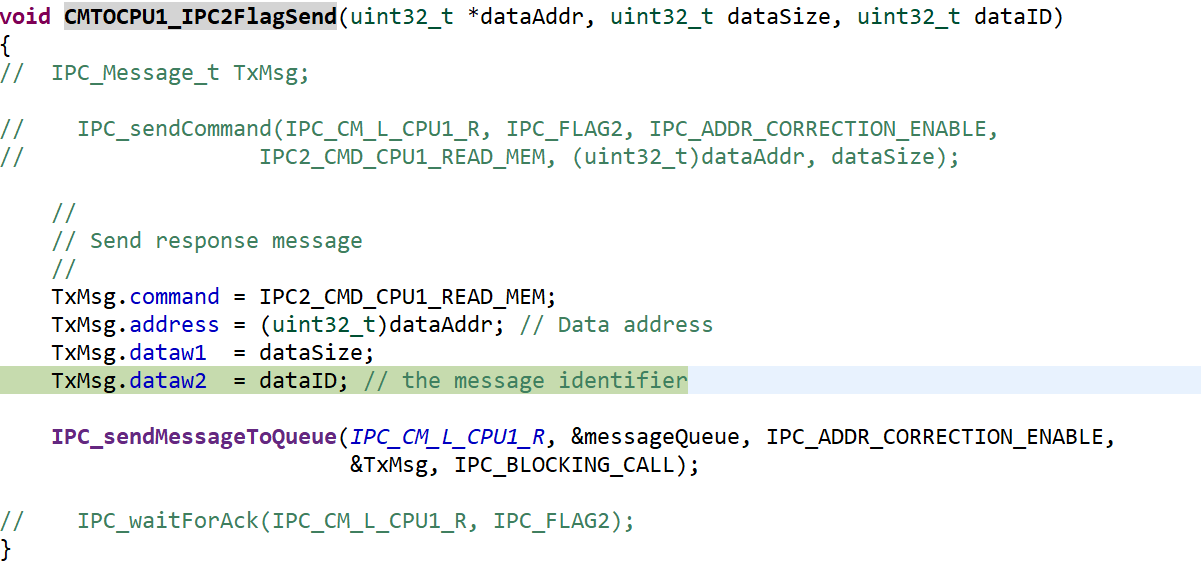
CM:
2) Is it required to call IPC_waitForAck to wait for a response after the sending side calls the IPC_sendCommand function when communicating with IPC non-message queues?
Because the customer has tried to send by calling only the IPC_sendCommand function, interrupts can be entered normally on the receiving side. However, there is a chance that the IPC_readCommand function will not be read out when called, and the receiving side will call the IPC_ackFlagRtoL function normally.
Could you help check this case? Thanks.
Best Regards,
Cherry

