Hi TI team:
please help to confirm ,how to set the delay of sample point ot avoid the switching noise .
I am using the universal motor control lab solution to run my own board and motor.
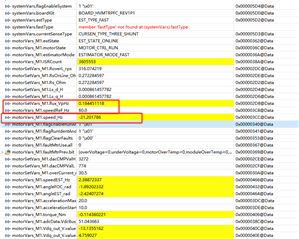
but in Level 3, the motorVars_M1.speed_Hz can not follow the motorVars_M1.speedRef_Hz.
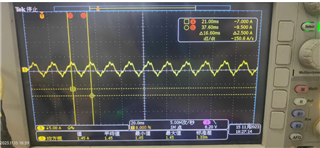
I check the current and voltage signal of ADC input ,find some switching noise.
So, I want to change the sampling point to avoiding the switching noise.
please help ,how to change . thanks a lot