Other Parts Discussed in Thread: DRV8353,
Hello Team,
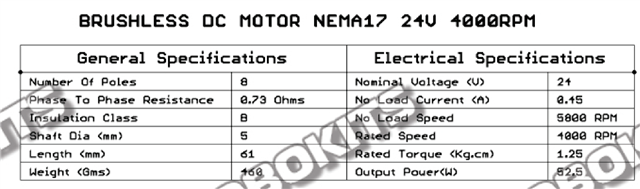
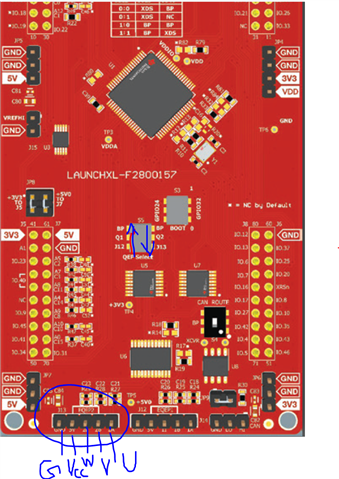
We are working on DRV8353 and TI launchpad F280015x for BLDC motor application. We have below query while interfacing with TI driver board and launch pad.
I configured with UCC code, I enabled the following macros HVMTRPFC_REV1P1, ENC, BSXL8353RS on the motor1_driver.c file.
Witch are the macros have to configure for DRV8353 and TI launchpad F280015x.
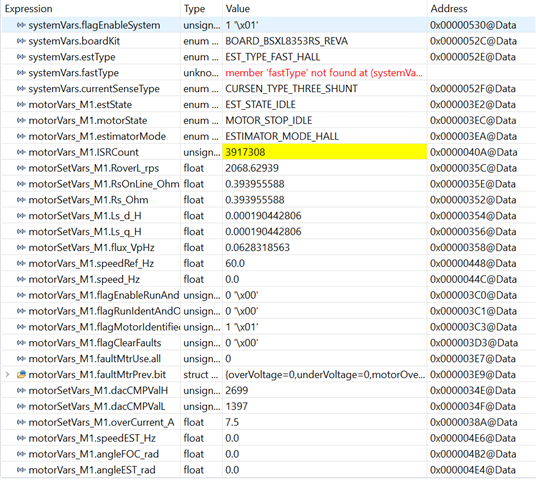
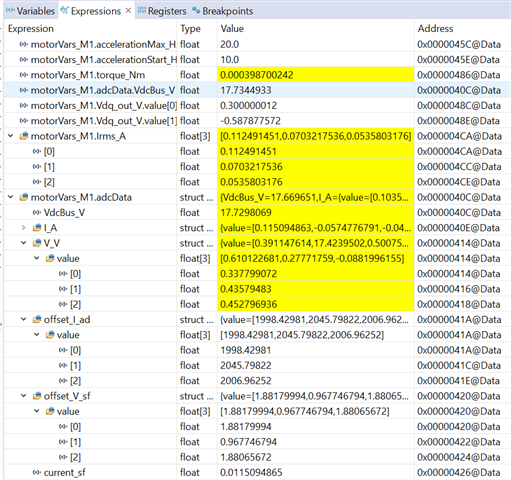
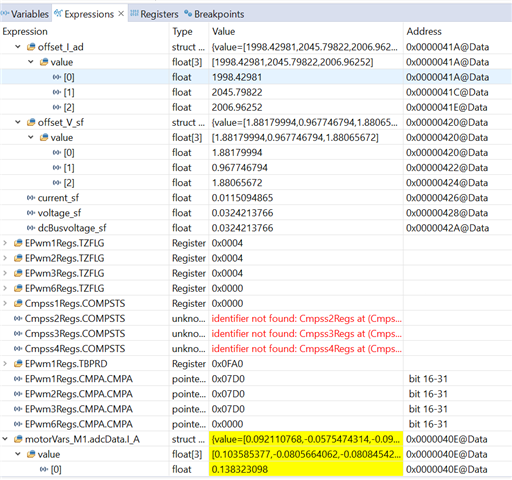
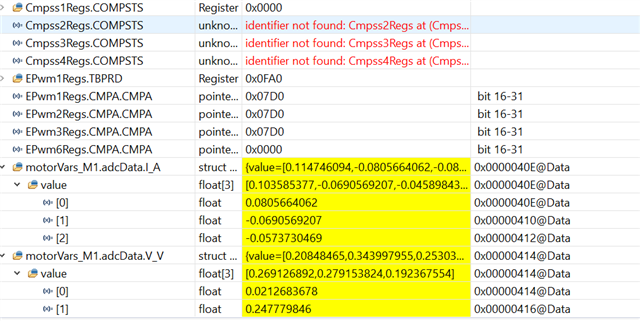
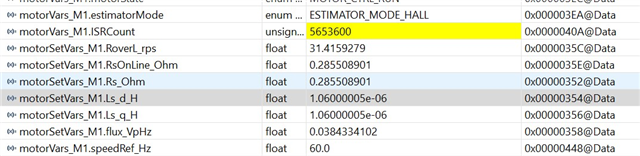
Input bus voltage : 24v I given. But it's not reading the input bus voltage. On the motorVars_M1.adcData.VdcBus_V variable
Can you help understand what we are missing?
Any help is much appreciated. Thanks in Advance.
Thanks & Regards,
T.Premkumar.