We are trying to make a SPI communication in F28335 device, and by sending the data from our TMS320F28335 SPI (MASTER) to external Slave device of HOLT INTEGRATED CIRCUIT HI-35850 (SLAVE) device board.
Here, We have configured the TMS320F28335 SPI device as a MASTER and HI-35850 as a SLAVE.
- For this, we were trying to send the Arinc data which is a 32 bits by 4 iterations, since we have configured SPICCR.bit.SPICHAR for a 8-bit word.
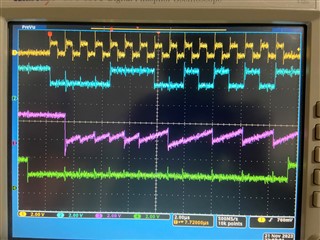
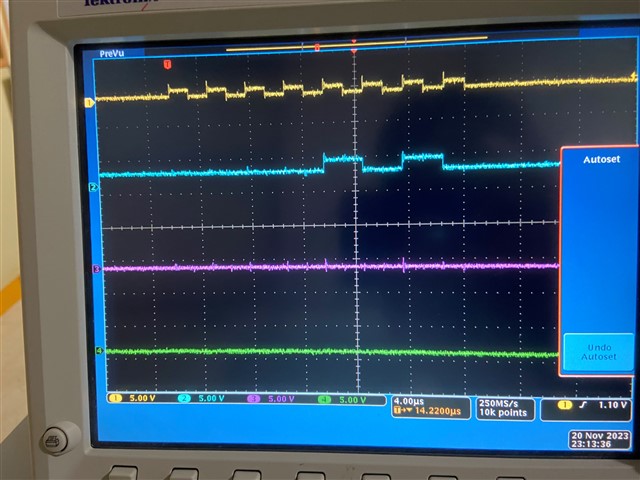
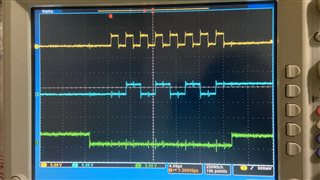
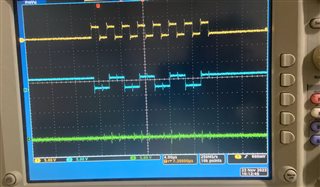
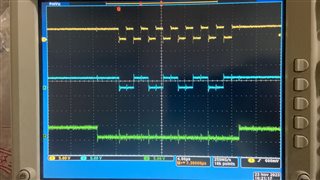
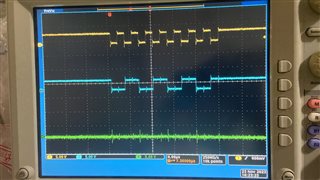
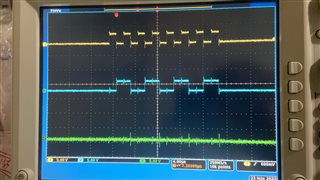
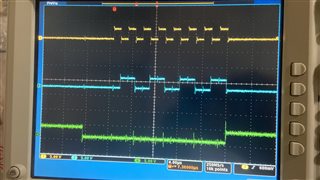
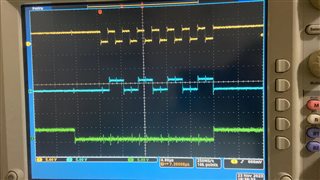
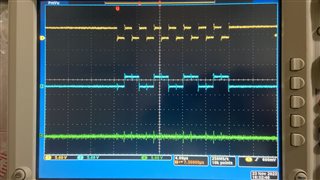
- We have captured and attached as a attachments Waveforms in 4-channel CRO with the SCLK, MISO, MOSI and CS. But we were unable to see more than 16-clocks in the waveforms and the Chip select (CS) was getting de-asserted, but we need 32 clocks for 32 bit and we need your support on this.
- And I had attached my C code below for SPI for this, along with Initialization and configuration in the module name Mcu1_Spi_initialization().
#include "Mcu1_Device.h"
#include "Mcu1_Timer.h"
#include "stdio.h"
#include "Mcu1_Arinc429.h"
#include "Mcu1_Spi.h"
#include "Mcu1_Arinc429_SPI.h"
void main(void)
{
// Initialize System Control:PLL, WatchDog
InitSysCtrl();
// Disable CPU interrupts
DINT;
Gpio_init();
InitPieCtrl();
/* Disable all interrupts and clear all interrupt flags:*/
IER = 0x0000;
IFR = 0x0000;
InitPieVectTable();
/* Initialize GPIO pins */
InitSpiaGpio();
/*Call spi initialization*/
Mcu1_Spi_initialization();
/* j is for index increment */
UNS8 j = 0;
/* Tx data Variable */
UNS8 Tdata = 0;
SpiaRegs.SPITXBUF = 0x1000;
SpiaRegs.SPITXBUF = 0x2000;
SpiaRegs.SPITXBUF = 0x2000;
for(j=0;j<=19;j++)
{
SpiaRegs.SPITXBUF = 0x0E00;
SpiaRegs.SPITXBUF = 0x5500;
SpiaRegs.SPITXBUF = 0x5500;
SpiaRegs.SPITXBUF = 0x5500;
SpiaRegs.SPITXBUF = 0x5500;
Tdata = SpiaRegs.SPITXBUF;
printf("transmitted data: 0x%X\n", Tdata);
}
}
void InitSpiaGpio()
{
EALLOW;
/* Enable pull-up for GPIO16, GPIO17, GPIO18 & GPIO19 */
GpioCtrlRegs.GPAPUD.bit.GPIO16 = 0; // (SPISIMOA)
GpioCtrlRegs.GPAPUD.bit.GPIO17 = 0; // (SPISOMIA)
GpioCtrlRegs.GPAPUD.bit.GPIO18 = 0; // (SPICLKA)
GpioCtrlRegs.GPAPUD.bit.GPIO19 = 0; // (SPISTEA)
/* Asynchronous input for GPIO16, GPIO17, GPIO18 & GPIO19 */
GpioCtrlRegs.GPAQSEL2.bit.GPIO16 = 3; // (SPISIMOA)
GpioCtrlRegs.GPAQSEL2.bit.GPIO17 = 3; // (SPISOMIA)
GpioCtrlRegs.GPAQSEL2.bit.GPIO18 = 3; // (SPICLKA)
GpioCtrlRegs.GPAQSEL2.bit.GPIO19 = 3; // (SPISTEA)
/* Configure MUX register pins GPIO16, GPIO17, GPIO18 & GPIO19 */
GpioCtrlRegs.GPAMUX2.bit.GPIO16 = 1; // SPISIMOA
GpioCtrlRegs.GPAMUX2.bit.GPIO17 = 1; // SPISOMIA
GpioCtrlRegs.GPAMUX2.bit.GPIO18 = 1; // SPICLKA
GpioCtrlRegs.GPAMUX2.bit.GPIO19 = 1; // SPISTEA
EDIS;
}
void Mcu1_Spi_initialization()
{
EALLOW;
/*Enabling peripheral clock*/
SysCtrlRegs.PCLKCR0.bit.SPIAENCLK = 1;
EDIS;
/* Configuration for SPI */
/**************************************************************************/
/* SPI SW RESET to 0 */
SpiaRegs.SPICCR.bit.SPISWRESET = 0;
/*SPI network mode, making as master */
SpiaRegs.SPICTL.bit.MASTER_SLAVE = 1;
/*Enabling talk bit for transmit enable */
SpiaRegs.SPICTL.bit.TALK = 1;
/* Clock Polarity to 0 */
SpiaRegs.SPICCR.bit.CLKPOLARITY = 0;
/* Clock Phase to 0 */
SpiaRegs.SPICTL.bit.CLK_PHASE = 0;
/* SPI baud rate control*/
SpiaRegs.SPIBRR = 0x27; // SPI_BRR
/* SPI Character bits to 8-bit word */
SpiaRegs.SPICCR.bit.SPICHAR = 0x7;
/* Clear OVERRUN Flag by giving 1 to this bit */
SpiaRegs.SPISTS.bit.OVERRUN_FLAG = 1;
/* Set SPIRSWRESET to 1 to release the SPI from reset state */
SpiaRegs.SPICCR.bit.SPISWRESET = 1;
/**************************************************************************/
}
Please visit to my attachments of the Waveforms and SPI code. And kindly suggest me, what need to be corrected.