


Hi,
Ti friends!
Recently, I have been experimenting with PMSM motor drivers, and I don't quite understand the problems associated with checking the official motor driver library of the TMDXIDDK379D kit. In the void FCL_runAbsEncPICtrlWrap(void) function and with the following comment:
// Wrap up function to be called by the user application at the completion of the application.
// Wrap up function to be called by the user application at the completion of
// Fast Current Loop in PI Control Mode for absolute encoder
As shown in the figure:
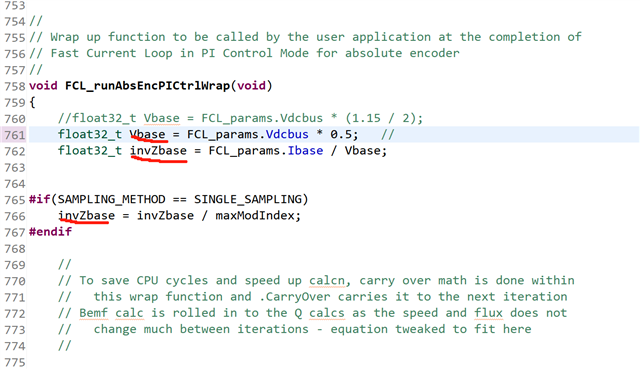
The first diagram above about float32_t Vbase float32_t invZbase and invZbase = invZbase / maxModIndex I don't quite understand; what do Vbase and invZbase act as?And next page:

I have to multiply invZbase inside the Kp parameter of this current loop, which is not quite the same as my conventional understanding of Kp=L*bandwith, don't quite get it here; also the Ki rounding is even more confusing to me. I routinely understand Ki = R/L, given the formula pi_id.Ki = FCL_params.Rd * invZbase * FCL_params.wccD * FCL_params.tSamp; there are invZbase, FCL_params.tSamp and other parameters, this is how to calculate?
Your help would be greatly appreciated, thank you!
