Part Number: TMS320F28379D
Other Parts Discussed in Thread: C2000WARE
Hi
I have a few troubles on F2837x CAN programming. When I read TI's CAN examples, I found a few issues that confuse me:
1. row 212 in can8_ex8_remote_tx.c of can8_ex8_remote_tx example, the following function call sends the data to a can receiver (CANA),
I think it should send to CANB's remote output channel for a new data replace.
CAN_sendMessage(CANA_BASE, TX_MSG_OBJ_ID, MSG_DATA_LENGTH, rxMsgData);
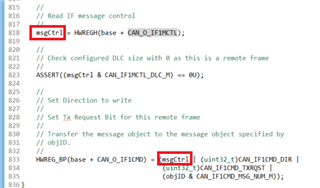
2. in can.c in driverlib, there is a function CAN_sendRemoteRequestMessage, it gets IF1MCTL to check DLC that is ok, but it sets msgCtrl to IF1CMD, is it a bug?