


Other Parts Discussed in Thread: C2000WARE
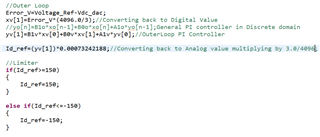
Just wanted to know, whether my above PI controller implementation is correct or not?
As of now its working fine.
Original question:

Just wanted to know, whether my above PI controller implementation is correct or not?
As of now its working fine.
