Part Number: TMS320F28388D
Hi Team,
Here are some issues from the customer may need your help:
I want to implement jumps between the two projects of CM and the two projects of CPU1 respectively. Some problems occurred during the implementation process:
The two projects of CM are CM_APP and CM_Bootloader, and the two projects of CPU1 are CPU1_APP and CPU1_Bootloader.
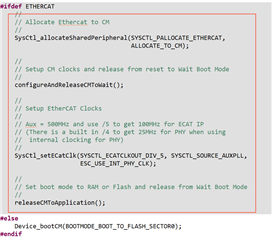
The configurations of CM and CPU1 APP are:

The bootloader's configurations is:

Question 1: In debug mode, CPU1 can jump between APP and bootloader normally, but CM will enter faultISR or defaultISR when jumping from one project to another (CM's APP has transplanted the lwip_udp protocol to realize network port communication).
Question 2: exit function does not work:

Question 3: If the ECAT clock function is set in the APP project of CPU1 (because the app program needs to implement ECAT communication), IPC_sync(IPC_CM_L_CPU1_R, IPC_SYNC) in the APP project of CPU1 will become invalid after powering on again.

The project is attached below, which can be directly programmed and run on the 28388 demo board.
--
Thanks & Regards