


Dear support team,
I'm currently testing my owm board with a software which is based on universal motor control SDK.
Motor are running correctly, startup is good, I also greatly improve the flying start by calculating Vd and Vq IN and setting those value to Id and Iq regulator output just before enabling PWM, this works very fine (I do the same in the past when it was INSTASPIN...).
I'm currently checking the max PWM duty cycle and I canont reach 100%.
I first try with #define USER_M1_MAX_VS_MAG_PU (0.576f) and then I increase to #define USER_M1_MAX_VS_MAG_PU (0.65f) but It remains lower than 100%.
Overmodulation is enabled with predefined symbol MOTOR1_OVM.
PWM freq is set to 19kHz, dead band delay count are set to 150 (=>1.5us), SVM is SVM_COM_C
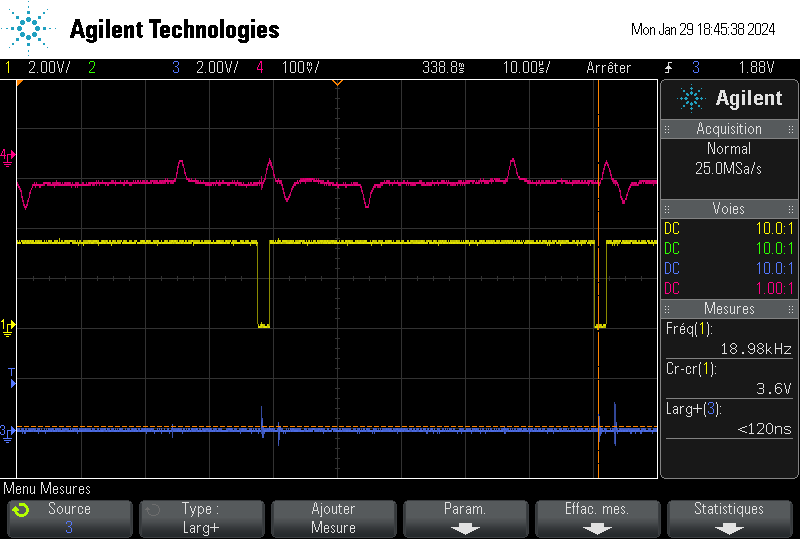
See below PWM_U_H (yellow), PWM_U_L (blue) and phase U current (should be inverted current clamp was set in the wrong direction), as you can see, I can have 0% duty cycle (0% PWM HIGH / 100% PWM LOW but not 100% on PWM HIGH)
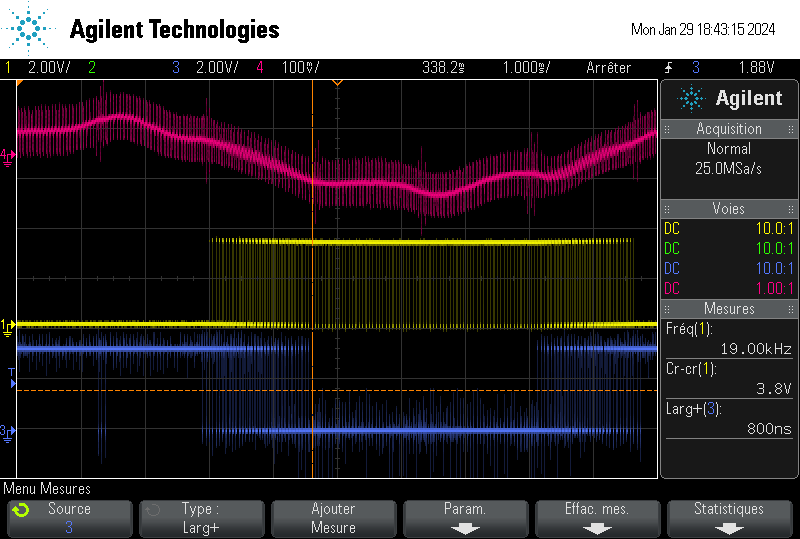
There is always a small pulse to 0 (a little bit less than 2us):
I cannot see why I can't have a real 100%. Can you please help me?
Regards.

