Other Parts Discussed in Thread: CONTROLSUITE
Hi,
I'm working on a project with FOC of 3-phase induction motors. We designed the PCB based on TMS320F28034 by ourselves not use the TI development kits.
I imported the following project and do some test.
C:\ti\controlSUITE\development_kits\HVMotorCtrl+PfcKit_v2.0\HVACI_Sensorless
I encounterd severl problems and want to ask you about them.
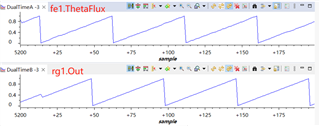
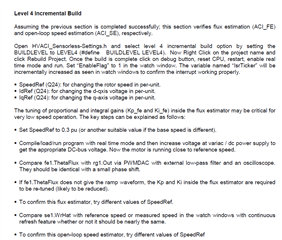
The 1st problem is that I did level 2 test and the waveform of Clark transformation is not smooth enough,
The setting is as below.
VdTesting = _IQ(0.07);
VqTesting = _IQ(0.07);
SpeedRef = _IQ(0.4);
The system current arrived at minimum and the speed arrived at the expected one under the above settings.
Does this waveform meet the requirements?
The waveform in the doc. Sensorless Field Oriented Control of 3-Phase Induction Motors.pdf is very smooth.
If I want to get more smooth waveform, should I adjust the parameters of VdTesting and VqTesting? Or is it hardware related?
The 2nd problem is that I can't adjust a proper value of kp and ki to make the motor work normally.
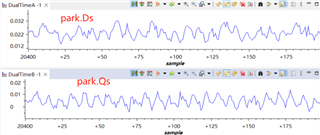
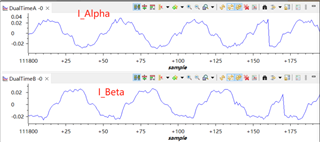
IdRef = _IQ(0.025);
IqRef = _IQ(0.005);
SpeedRef = _IQ(0.4);
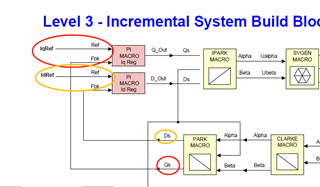
IdRef and IqRef is the output of Park transformation in level 2 test when SpeedRef is 0.4. They are vibrating all the time, not stable values, is this normal?
I tried a lot of Kp and Ki values, but the PI output D_Out and Q_Out can't arrive the value(_IQ(0.07)) of VdTesting and VqTesting in level 2 test.
These two values are less than _IQ(0.07), so the motor could not be drived.
The motor can be drived if I set the IdRef and IqRef even bigger, but the output of PI is the maximum value I set, and the difference between Ref and Fbk is too big. I don't think it is a normal state.
Would you please give me some suggestions about PI regulator?
Is there anything else can I do to sovle these problems?
Waiting for your reply.
Best regards,
Sarah