Part Number: TMS320F280039C
Other Parts Discussed in Thread: SYSCONFIG
Hello,
I have the following scenario, which I would like to implement:
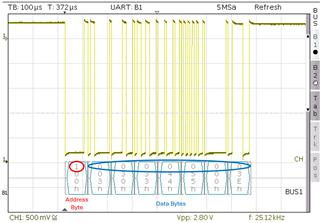
I use the Address-Bit Multiprocessor Mode to synchronize the messages on a UART bus with several participants. A FreeRTOS is running on each participant, whose task for the UART communication is triggered by the interrupt of an incoming address byte via "give" a semaphore. This also works so far.
However, I have the problem that I can read the subsequent data bytes incorrectly or not at all. I do not use a FIFO, as this cannot be combined with the address bit mode according to my programming experience. At the moment my program works as follows:
1. Interrupt through address byte (address bit = 1)
2. Read the incoming address of the input buffer using the SCI_readCharBlockingNonFIFO() function, defined in the sci.h file
3. Check if the address matches
4. If the address is matching, disable Sleep Mode
5. Read the following data also using the SCI_readCharBlockingNonFIFO() function, defined in the sci.h file (which does not work properly)
Are there any examples for this or is there anything special I need to consider when looking at the following data bytes?
Regards
Joshua