Part Number: TMS320F28388D
Other Parts Discussed in Thread: SYSCONFIG, C2000WARE, TMDSCNCD28388D
Tool/software:
Hi
I'm trying to get LS7366R iC's register value through SPI however, I have some problems with it and I need some help please cause I couldn't solve these problems for about 3 weeks ...
This is the SPI protocol diagram that I want to make between LS7366R(SPI slave) and TMS320F28388D(SPI master).
(This is the diagram from LS7366R datasheet. LS7366R datasheet link : https://lsicsi.com/datasheets/LS7366R.pdf) 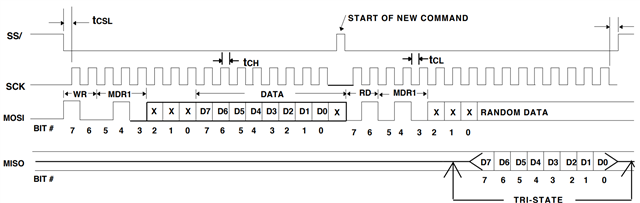
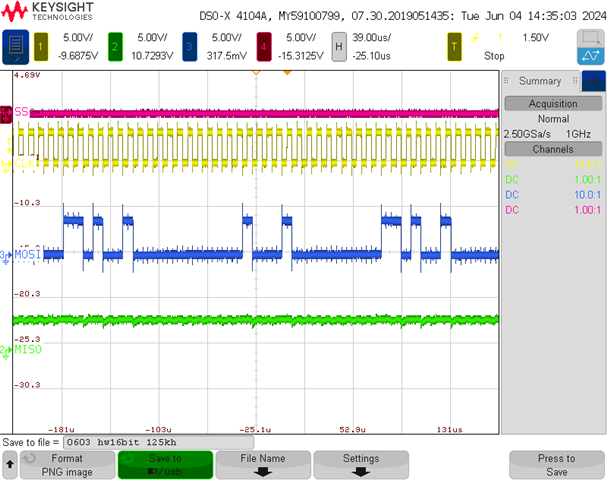
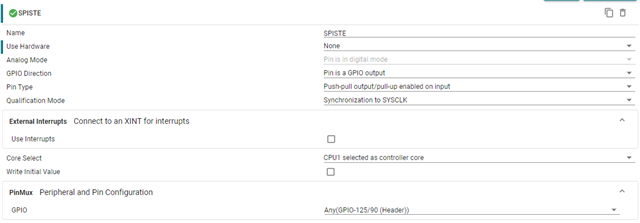
So I set my sysconfig settings, wrote the code, and connected the SPI lines to oscilloscope. These pictures are my sysconfig settings, codes, and oscilloscope signal screenshots.


//#############################################################################
//
// FILE: spi_ex1_loopback.c
//
// TITLE: SPI Digital Loopback
//
//! \addtogroup driver_example_list
//! <h1>SPI Digital Loopback</h1>
//!
//! This program uses the internal loopback test mode of the SPI module. This
//! is a very basic loopback that does not use the FIFOs or interrupts. A
//! stream of data is sent and then compared to the received stream.
//! The pinmux and SPI modules are configure through the sysconfig file.
//!
//! The sent data looks like this: \n
//! 0000 0001 0002 0003 0004 0005 0006 0007 .... FFFE FFFF 0000
//!
//! This pattern is repeated forever.
//!
//! \note This example project has support for migration across our C2000
//! device families. If you are wanting to build this project from launchpad
//! or controlCARD, please specify in the .syscfg file the board you're using.
//! At any time you can select another device to migrate this example.
//!
//! \b External \b Connections \n
//! - None
//!
//! \b Watch \b Variables \n
//! - \b sData - Data to send
//! - \b rData - Received data
//!
//
//#############################################################################
//
//
// $Copyright:
// Copyright (C) 2022 Texas Instruments Incorporated - http://www.ti.com
//
// Redistribution and use in source and binary forms, with or without
// modification, are permitted provided that the following conditions
// are met:
//
// Redistributions of source code must retain the above copyright
// notice, this list of conditions and the following disclaimer.
//
// Redistributions in binary form must reproduce the above copyright
// notice, this list of conditions and the following disclaimer in the
// documentation and/or other materials provided with the
// distribution.
//
// Neither the name of Texas Instruments Incorporated nor the names of
// its contributors may be used to endorse or promote products derived
// from this software without specific prior written permission.
//
// THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
// "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
// LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR
// A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT
// OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL,
// SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT
// LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE,
// DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY
// THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT
// (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
// OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
// $
//#############################################################################
/*Included Files*/
#include "driverlib.h"
#include "device.h"
#include "board.h"
#include <stdio.h>
/*IR REG*/
//OP CODE
#define CLR_REG 0x00
#define RD_REG 0x40
#define WR_REG 0x80
#define LOAD_REG 0xC0
//SEL REG
#define MDR0 0x00 | (0b001 << 3)
#define MDR1 0x00 | (0b010 << 3)
/*MDR0 SETTING*/
#define MDR0_4QUAD_MODE 0x00 | 0b11
/*MDR1 SETTING*/
#define MDR1_4BYTE_MODE 0x00 | 0b00
#define STE_HIGH GPIO_writePin(SPISTE, 1)
#define STE_LOW GPIO_writePin(SPISTE, 0)
#define STE_STATE GPIO_readPin(SPISTE)
/*private code*/
#define nData 2
uint16_t TxData[nData] = {0,};
uint16_t RxData[nData] = {0,};
/*Main*/
void main(void)
{
/*start settings*/
// Initialize device clock and peripherals
Device_init();
// Disable pin locks and enable internal pullups.
Device_initGPIO();
// Initialize PIE and clear PIE registers. Disables CPU interrupts.
Interrupt_initModule();
// Initialize the PIE vector table with pointers to the shell Interrupt
// Service Routines (ISR).
Interrupt_initVectorTable();
// Board initialization
Board_init();
// Enable Global Interrupt (INTM) and realtime interrupt (DBGM)
EINT;
ERTM;
/*USER CODE*/
STE_HIGH;
while(1)
{
STE_LOW;
TxData[0] = (WR_REG | MDR0);
TxData[1] = (MDR0_4QUAD_MODE);
SPI_writeDataBlockingNonFIFO(mySPI0_BASE, (TxData[0] << 8U));
SPI_writeDataBlockingNonFIFO(mySPI0_BASE, (TxData[1] << 8U));
// DEVICE_DELAY_US(200);
STE_HIGH;
DEVICE_DELAY_US(20);
// DEVICE_DELAY_US(1000);
//
// STE_LOW;
// SPI_writeDataBlockingNonFIFO(mySPI0_BASE, (RD_REG | MDR0) << 8U);
// RxData[0] = SPI_readDataBlockingNonFIFO(mySPI0_BASE);
// DEVICE_DELAY_US(20);
// STE_HIGH;
//
// DEVICE_DELAY_US(1000);
}
}
//
// End File
//

CLK should only work when STE == LOW, CLK also works when STE == HIGH.
If you look at the logic of the main code, there is absolutely no reason for CLK to work because it raises STE to HIGH after the data transmit, but I don't know why it's like this.
Looking at the oscilloscope waveform, SPI_writeDataBlockingNonFIFO and STE seem to operate independently.
Is this because of the operation of STE with GPIO? I don't know why...
In order to solve the problem of not working when the data transfer function is in the STE==LOW state, DEVICE_DELAY_US (200) was arbitrarily given between SPI_writeDataBlockingNonFIFO and STE_HIGH, and the following waveform was taken.
At this time, when looking at the STE(=SS) waveform, the LOW state is maintained exactly about 200us.
So, I wrote it in order on the code, but do GPIO and SPI move independently? How should I look at this phenomenon?
And if this is a problem caused by controlling with GPIO, how should I set it up in the SPI of sysconfig to send two 8bit data in a row?