Part Number: TMS320F28027F
Other Parts Discussed in Thread: MOTORWARE, DRV8301, , DRV8305, CONTROLSUITE, C2000WARE
Tool/software:
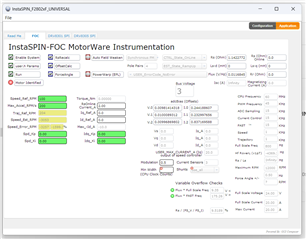
I have taken example
C:\ti\motorware\motorware_1_01_00_18\sw\solutions\instaspin_foc\boards\boostxldrv8301_revB\f28x\f2802xF\projects\ccs\proj_lab5b
TMS320F28027F with DRV8301 to run BLDC Motor are not
Any changed the parameters in the user.h file:

I have taken above BLDC motor. In user.h.
I am define
#define USER_MOTOR My_Motor
#elif (USER_MOTOR == My_Motor)
#define USER_MOTOR_TYPE MOTOR_Type_Pm
#define USER_MOTOR_NUM_POLE_PAIRS (2)
#define USER_MOTOR_Rr (NULL)
#define USER_MOTOR_Rs (0.3918252)
#define USER_MOTOR_Ls_d (0.00023495)
#define USER_MOTOR_Ls_q (0.00023495)
#define USER_MOTOR_RATED_FLUX (0.03955824)
#define USER_MOTOR_MAGNETIZING_CURRENT (NULL)
#define USER_MOTOR_RES_EST_CURRENT (3.0)
#define USER_MOTOR_IND_EST_CURRENT (-0.5)
#define USER_MOTOR_MAX_CURRENT (20.0)
#define USER_MOTOR_FLUX_EST_FREQ_Hz (20.0)
the above all are already declared.
My BLDC motor (A2212/13T) 1000KV.
Any changes the above declare the calculation values. Please tell me calculation of my BLDC motor (A2212/13T) 1000KV.