Other Parts Discussed in Thread: DRV8353
Tool/software:
Hello Team,
F2800157 integrated with UMC code (latest SDK_2.0.0) and gate driver specific not specific to TI tested with 48V(ABI-encoder). when try to run the motor
most the time its successful able to achieve mentioned speed and able to control the motor at mentioned speed.
With our custom board and 48V encoder, we are currently facing the following two problems.
1) Sometimes the motor runs at its uncontrolled maximum speed.
When occasionally motor runs at uncontrollable maximum speed. It's clearly showing issues in motor alignment and encoder offset creating issues.
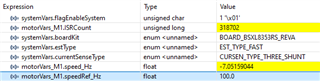
In order to avoid offset calibration, increased Idq current at the alignment state like below. Still issues occurring rarely

We are facing this uncontrolled speed issue in build level 4, but we are not facing this issue in build level 2 and 3.
how to fix the alignment issues with encoder index offset calibration in build level 4?
2) Motor rated and maximum frequencies are 300 and 600 Hz respectively but in build level 4 we are not able to achieve neither rated nor maximum speed (600 Hz) using the above 48V encoder motor, when it is running at the mentioned speed.
But in level 2 we are able to run the motor up to its maximum frequency but only in build level 4 we are able achieve up to 260 Hz which is less than the rated speed of the motor.
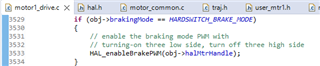
regarding this issue we have tested the motor with even less dead band but still we are not able to achieve the maximum speed.
We are keeping the same motor parameters in builds 2 and 4, but we are still unable to reach the top speed.
Please advise how to identify the problem so that build level 4 can operate at its fastest achievable speed.
Thank you
Regards,
Kirana H P