Part Number: TMS320F28P650DK
Other Parts Discussed in Thread: C2000WARE
Tool/software:
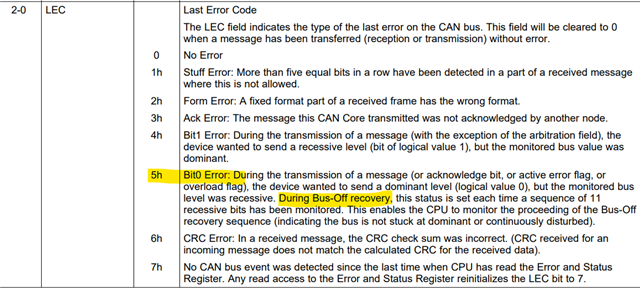
How the MCAN recovers from a CAN bus off status
Part Number: TMS320F28P650DK
Other Parts Discussed in Thread: C2000WARE
Tool/software:
How the MCAN recovers from a CAN bus off status