Other Parts Discussed in Thread: SYSCONFIG
Tool/software:
Hi Expert,
When we implemented ADC-related tests on TI LaunchPad, we found that
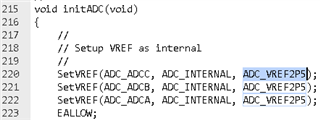
When we select the ADC reference voltage to be provided internally (3.3V)
When reading the value, I found that the measured voltage needs to be greater than half of the reference voltage (above 1.65v) before the reading value starts to change (the changed value looks correct)
But when the measured voltage is less than half of the reference voltage, the reading value will remain at about 280 (even when the measured voltage = 0)
I have tried several different sets of ADC pins with the same result.
Currently, a set of PWM is used to trigger each ADC reading.
Thanks
Daniel