Part Number: TMS320F280049C
Other Parts Discussed in Thread: TIDM-DC-DC-BUCK, C2000WARE
Tool/software:
Hello,
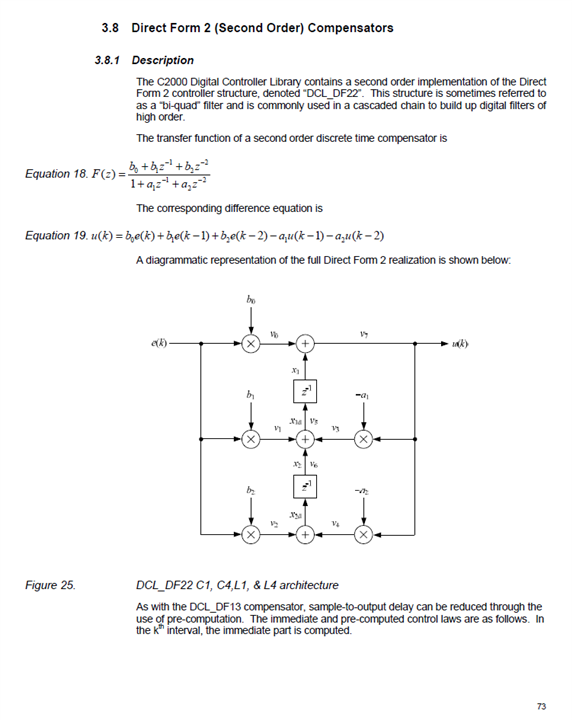
There is an ambiguity in frequency domain representation of 2p2z controller. The continuous time-domain transfer function representation mentioned in application note “Digital Peak Current Mode Control With Slope Compensation Using the TMS320F2803x” is different from the one seen in the compensator design GUI present in CCS.
Transfer Function in Application note:
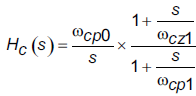
Transfer Function seen in GUI:

In the code blocks of TIDM-DC-DC-Buck, I have seen use of gain "K_DC" in definitions. However, I am unable to make co-relation between the two forms of continuous time transfer functions as both form a 2p2z controller when transformed to discrete time domain. Please clarify how a continuous time domain transfer function gets represented in discrete time domain and used in code blocks.
Thanks & Regards,
Anirudh