Part Number: TMS320F28388D
Other Parts Discussed in Thread: C2000WARE, TMDSCNCD28388D
Tool/software:
Hello,
I'm trying to validate FSI connection between two DSPs by following the tutorial provided in the application note. However, the two example codes used in the tutorial: fsi_ex14_dual_line_delay_select_rx, fsi_ex14_dual_line_delay_select_tx and fsi_ex15_find_optimal_delay_device2 and fsi_ex15_find_optimal_delay_device1 are missing in C2000Ware for the F28388D line microcontroller. I was able to locate fsi_ex14 example code for the F28004X family MCUs and made some changes to the code for it to build and run on the F28388D. But the program cannot get pass the handshaking stage. Can someone tell me why this is happening? Thanks in advance.
Austin
Modified fsi_ex14_dual_line_delay_select_rx:
//#############################################################################
//
// FILE: fsi_dual_line_delay_select_rx.c
//
// TITLE: FSI Skew Calibration in Dual Data Line Mode (RX Device)
//
//! \addtogroup driver_example_list
//! <h1>FSI Skew Calibration in Dual Data Line Mode (RX Device)</h1>
//!
//! In order to understand this example better and visualize the results
//! please refer to: [Fast Serial Interface (FSI) Skew
//! Compensation](http://www.ti.com/lit/an/spracj9/spracj9.pdf)
//!
//! Companion: fsi_dual_line_delay_select_tx
//! In this example, the FSI module is configured to listen for a ping at dual data rate
//! (using both RXD0 and RXD1). The software tests whether the ping sent from the TX
//! device is correctly received against all combinations of delay elements activated.
//! RXD0: 0-31 delay elements activated
//! RXD1: 0-31 delay elements activated
//! RXCLK: 0-31 delay elements activated
//! The software stores the status of the ping received (fail/pass) for each of the
//! 32x32x32 combinations of the delay line elements. This result can be graphed using
//! the FSI Skew Compensation Utility.
//!
//!\b External \b Connections \n
//! For FSI external connection, make below GPIO settings in
//! example code.
//!
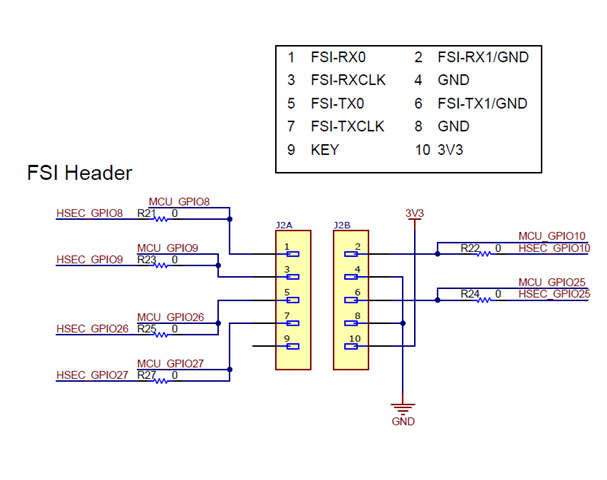
//! ControlCard FSI Header GPIOs:
//! - GPIO_27 -> FSITXA_CLK
//! - GPIO_26 -> FSITXA_TX0
//! - GPIO_25 -> FSITXA_TX1
//! - GPIO_9 -> FSIRXA_CLK
//! - GPIO_8 -> FSIRXA_RX0
//! - GPIO_10 -> FSIRXA_RX1
//!
//! LaunchPad FSI Header GPIOs:
//! - GPIO_7 -> FSITX_CLK
//! - GPIO_6 -> FSITX_TX0
//! - GPIO_25 -> FSITX_TX1
//! - GPIO_33 -> FSIRX_CLK
//! - GPIO_12 -> FSIRX_RX0
//! - GPIO_2 -> FSIRX_RX1
//!
//! \b Watch \b Variables \n
//! - \b pingAndDataStatus The success/failure status for each config
//!
//
//#############################################################################
//
//
// $Copyright:
// Copyright (C) 2024 Texas Instruments Incorporated - http://www.ti.com/
//
// Redistribution and use in source and binary forms, with or without
// modification, are permitted provided that the following conditions
// are met:
//
// Redistributions of source code must retain the above copyright
// notice, this list of conditions and the following disclaimer.
//
// Redistributions in binary form must reproduce the above copyright
// notice, this list of conditions and the following disclaimer in the
// documentation and/or other materials provided with the
// distribution.
//
// Neither the name of Texas Instruments Incorporated nor the names of
// its contributors may be used to endorse or promote products derived
// from this software without specific prior written permission.
//
// THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
// "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
// LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR
// A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT
// OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL,
// SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT
// LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE,
// DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY
// THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT
// (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
// OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
// $
//#############################################################################
//
// Included Files
//
#include "driverlib.h"
#include "device.h"
#define PRESCALER_VAL FSI_PRESCALE_50MHZ
#define COUNTER_TIMEOUT 200
#define PING_TIMEOUT_VALUE 1
#define PING_ERROR_MAX 10
#define FSI_DELAY_MAX 31
#define FSI_DELAY_MIN 0
#define FSI_PASS 1UL
#define FSI_FAIL 0UL
#define FSI_PACKAGE_COUNT 16
#define FSI_NUM_WORDS 6
uint32_t delayTapRX0 = 0;
uint32_t delayTapRX1 = 0;
uint32_t delayTapCLK = 0;
uint32_t totalRX2Interrupts = 0;
// In order to understand this example better and visualize the results
// please refer to: http://www.ti.com/lit/an/spracj9/spracj9.pdf
// You can use the GUI in the application report above to visualize the
// pingAndDataStatus variable on a graph.
// This variable contains the success/failure of communication using
// all 32x32x32 options of the RXD0, RXD1 and CLK delay elements.
uint32_t pingAndDataStatus [32][32] = {0};
uint16_t cpuTimer0IntCount = 0;
FSI_DataWidth nLanes = FSI_DATA_WIDTH_2_LANE;
uint16_t txEventSts = 0, rxEventSts = 0;
uint16_t *txBufAddr = 0, *rxBufAddr = 0;
uint16_t txBufData[16] = {0};
volatile uint32_t fsiTxInt1Received = 0,fsiTxInt2Received = 0;
volatile uint32_t fsiRxInt1Received = 0,fsiRxInt2Received = 0;
uint32_t rxTimeOutCntr = COUNTER_TIMEOUT;
uint32_t error = 0;
//
// Function Prototypes
//
static inline void compare16(uint16_t val1, uint16_t val2);
void disableAllFSIInterrupts(void);
void checkReceivedFrameTypeTag(FSI_FrameType type, FSI_FrameTag tag);
void initFSI(void);
void prepareTxBufData(void);
bool checkFSIPackageData();
void
FSI_configRxDelayLine_fix(uint32_t base, FSI_RxDelayTapType delayTapType,
uint16_t tapValue);
void initCPUTimer(void);
void configCPUTimer(uint32_t, float, float);
__interrupt void cpuTimer0ISR(void);
__interrupt void fsiTxInt1ISR(void);
__interrupt void fsiTxInt2ISR(void);
__interrupt void fsiRxInt1ISR(void);
__interrupt void fsiRxInt2ISR(void);
#define CHECK_TIMEOUT() if(cpuTimer0IntCount>=PING_TIMEOUT_VALUE || fsiRxInt2Received > PING_ERROR_MAX){goto CHECK_RESULT;}
#define CHECK_TIMEOUT_DATA() if(cpuTimer0IntCount>=PING_TIMEOUT_VALUE || fsiRxInt2Received > 0){goto CHECK_RESULT_DATA;}
//
// Main
//
void main(void)
{
//
// Initialize device clock and peripherals
//
Device_init();
//
// Disable pin locks and enable internal pullups.
//
Device_initGPIO();
//
// Initialize PIE and clear PIE registers. Disables CPU interrupts.
//
Interrupt_initModule();
//
// Initialize the PIE vector table with pointers to the shell Interrupt
// Service Routines (ISR).
//
Interrupt_initVectorTable();
//
// Interrupts that are used in this example are re-mapped to ISR functions
// found within this file. Total 4; FSI Tx/Rx :: INT1/INT2
//
Interrupt_register(INT_FSITXA1, &fsiTxInt1ISR);
Interrupt_register(INT_FSITXA2, &fsiTxInt2ISR);
Interrupt_register(INT_FSIRXA1, &fsiRxInt1ISR);
Interrupt_register(INT_FSIRXA2, &fsiRxInt2ISR);
//
// ISRs for each CPU Timer interrupt
//
Interrupt_register(INT_TIMER0, &cpuTimer0ISR);
//
// Enable Global Interrupt (INTM) and realtime interrupt (DBGM)
//
EINT;
ERTM;
// Loop through all 32x32x32 delay line possibilities!
for (delayTapCLK = FSI_DELAY_MIN;
delayTapCLK <= FSI_DELAY_MAX; delayTapCLK++)
{
for (delayTapRX0 = FSI_DELAY_MIN;
delayTapRX0 <= FSI_DELAY_MAX; delayTapRX0++)
{
for (delayTapRX1 = FSI_DELAY_MIN;
delayTapRX1 <= FSI_DELAY_MAX; delayTapRX1++)
{
uint16_t packageCount = 0;
bool packageVerificationResult = false;
//
// Initialize the timer for making sure we timeout incase to frame is received
//
initCPUTimer();
//
// Configure CPU-Timer 0
//
configCPUTimer(CPUTIMER0_BASE, DEVICE_SYSCLK_FREQ, 10000);
// Enable Timer Interrupt
CPUTimer_enableInterrupt(CPUTIMER0_BASE);
//
// Enable TINT0 in the PIE: Group 1 interrupt 7
//
Interrupt_enable(INT_TIMER0);
//
// Starts CPU-Timer 0.
//
CPUTimer_startTimer(CPUTIMER0_BASE);
//
// Initialize basic settings for FSI
//
initFSI();
FSI_setRxDataWidth(FSIRXA_BASE, nLanes);
FSI_setTxDataWidth(FSITXA_BASE, nLanes);
//
// Setup the delay Taps
//
FSI_configRxDelayLine_fix(FSIRXA_BASE, FSI_RX_DELAY_D1, delayTapRX1);
FSI_configRxDelayLine_fix(FSIRXA_BASE, FSI_RX_DELAY_D0, delayTapRX0);
FSI_configRxDelayLine_fix(FSIRXA_BASE, FSI_RX_DELAY_CLK, delayTapCLK);
//
// Enable FSI Tx/Rx interrupts
//
Interrupt_enable(INT_FSITXA1);
Interrupt_enable(INT_FSITXA2);
Interrupt_enable(INT_FSIRXA1);
Interrupt_enable(INT_FSIRXA2);
//
// Enable normal data transfer events to be sent over INT1 line
//
FSI_enableTxInterrupt(FSITXA_BASE, FSI_INT1, FSI_TX_EVT_FRAME_DONE);
FSI_enableRxInterrupt(FSIRXA_BASE, FSI_INT1, FSI_RX_EVT_PING_FRAME);
//
// Now Check for Error
//
FSI_enableRxInterrupt(FSIRXA_BASE, FSI_INT2, FSI_RX_EVT_CRC_ERR |
FSI_RX_EVT_EOF_ERR |
FSI_RX_EVT_TYPE_ERR);
fsiRxInt1Received = 0;
fsiRxInt2Received = 0;
while(1)
{
//
// Wait till interrupt is received on FSIRX INT1 line, verify it's for FRAME
// DONE event for PING Frame reception
//
while(fsiRxInt1Received != 1)
{
//Time out and exit if the timer reaches timeout value
CHECK_TIMEOUT();
}
compare16(rxEventSts, (FSI_RX_EVT_PING_FRAME | FSI_RX_EVT_FRAME_DONE));
checkReceivedFrameTypeTag(FSI_FRAME_TYPE_PING, FSI_FRAME_TAG0);
//
// If received frame type and tag matches, exit this loop and proceed to
// next step by sending flush sequence, otherwise clear error and
// interrupt flag and continue looping.
//
if(error == 0)
{
fsiRxInt1Received = 0;
break;
}
fsiRxInt1Received = 0;
error = 0;
}
fsiRxInt1Received = 0;
fsiRxInt2Received = 0;
while(1)
{
//
// Send the flush sequence
//
FSI_executeTxFlushSequence(FSITXA_BASE, PRESCALER_VAL);
//
// Send a ping frame with frame tag 0001b
//
FSI_setTxFrameTag(FSITXA_BASE, FSI_FRAME_TAG1);
FSI_setTxFrameType(FSITXA_BASE, FSI_FRAME_TYPE_PING);
FSI_startTxTransmit(FSITXA_BASE);
while(fsiRxInt1Received != 1U && rxTimeOutCntr != 0U)
{
CHECK_TIMEOUT();
DEVICE_DELAY_US(1);
rxTimeOutCntr--;
}
if(rxTimeOutCntr == 0)
{
rxTimeOutCntr = COUNTER_TIMEOUT;
continue;
}
else
{
compare16(rxEventSts, (FSI_RX_EVT_PING_FRAME | FSI_RX_EVT_FRAME_DONE));
checkReceivedFrameTypeTag(FSI_FRAME_TYPE_PING, FSI_FRAME_TAG1);
//
// If received frame type and tag matches, exit this loop and proceed
// to next step by sending flush sequence, otherwise clear error and
// interrupt flag and continue looping.
//
if(error == 0)
{
fsiRxInt1Received = 0;
break;
}
fsiRxInt1Received = 0;
error = 0;
}
}
CHECK_RESULT:
packageCount = 0;
if (cpuTimer0IntCount >= PING_TIMEOUT_VALUE || fsiRxInt2Received > PING_ERROR_MAX)
{
// ESTOP0;
// If ping failed!
}
else
{
cpuTimer0IntCount = 0;
//
// Now that ping has passed check data transfer of 16 data packages
//
FSI_enableRxInterrupt(FSIRXA_BASE, FSI_INT2, FSI_RX_EVT_CRC_ERR |
FSI_RX_EVT_EOF_ERR |
FSI_RX_EVT_TYPE_ERR);
FSI_disableRxInterrupt(FSIRXA_BASE, FSI_INT1, FSI_RX_EVT_PING_FRAME);
FSI_enableRxInterrupt(FSIRXA_BASE, FSI_INT1, FSI_RX_EVT_DATA_FRAME);
fsiRxInt1Received = 0U;
fsiRxInt2Received = 0U;
packageCount = 0;
DEVICE_DELAY_US(10);
FSI_setRxSoftwareFrameSize(FSIRXA_BASE, FSI_NUM_WORDS);
FSI_setRxDataWidth(FSIRXA_BASE, nLanes);
FSI_setRxBufferPtr(FSIRXA_BASE, 0U);
//
// Now, start Receiving data frames
//
while(packageCount < FSI_PACKAGE_COUNT)
{
while(fsiRxInt1Received != 1U){
CHECK_TIMEOUT_DATA();
}
packageVerificationResult = checkFSIPackageData();
packageCount++;
if (!packageVerificationResult)
{
goto CHECK_RESULT_DATA;
}
//
// Re-initialize flags and buffer pointer before next transmission
//
fsiRxInt1Received = 0U;
fsiRxInt2Received = 0U;
FSI_setRxBufferPtr(FSIRXA_BASE, 0U);
}
}
CHECK_RESULT_DATA:
disableAllFSIInterrupts();
CPUTimer_stopTimer(CPUTIMER0_BASE);
// If Data verification passed and timeouts didnt occurre, then pass
if (packageVerificationResult == true &&
cpuTimer0IntCount < PING_TIMEOUT_VALUE &&
packageCount >= FSI_PACKAGE_COUNT)
{
// In order to understand this example better and visualize the results
// please refer to: http://www.ti.com/lit/an/spracj9/spracj9.pdf
// You can use the GUI in the application report above to visualize the
// pingAndDataStatus variable on a graph.
// This variable contains the success/failure of communication using
// all 32x32x32 options of the RXD0, RXD1 and CLK delay elements.
pingAndDataStatus[delayTapCLK][delayTapRX0] |= (FSI_PASS << delayTapRX1);
}
}
}
}
// The system has completed gathering data
// In order to understand this example better and visualize the results
// please refer to: http://www.ti.com/lit/an/spracj9/spracj9.pdf
// You can use the GUI in the application report above to visualize the
// pingAndDataStatus variable on a graph.
// This variable contains the success/failure of communication using
// all 32x32x32 options of the RXD0, RXD1 and CLK delay elements.
ESTOP0;
while(1);
}
//
// initFSI - Initializes FSI Tx/Rx with internal loopback and also sends FLUSH
// sequence.
//
void initFSI(void)
{
FSI_disableRxInternalLoopback(FSIRXA_BASE);
//
// NOTE: External loopback, Modify GPIO settings as per setup
//
GPIO_setPinConfig(DEVICE_GPIO_CFG_FSI_TXCLK);
GPIO_setPinConfig(DEVICE_GPIO_CFG_FSI_TX0);
GPIO_setPinConfig(DEVICE_GPIO_CFG_FSI_RXCLKA);
GPIO_setPinConfig(DEVICE_GPIO_CFG_FSI_RX0A);
if(nLanes == FSI_DATA_WIDTH_2_LANE)
{
GPIO_setPinConfig(DEVICE_GPIO_CFG_FSI_TX1);
GPIO_setPinConfig(DEVICE_GPIO_CFG_FSI_RX1A);
}
//
// Set RX GPIO to be asynchronous
// (pass through without delay)
// Default setting is to have 2 SYS_CLK cycles delay
//
GPIO_setQualificationMode(DEVICE_GPIO_PIN_FSI_RX0A, GPIO_QUAL_ASYNC);
GPIO_setQualificationMode(DEVICE_GPIO_PIN_FSI_RXCLKA, GPIO_QUAL_ASYNC);
if(nLanes == FSI_DATA_WIDTH_2_LANE)
{
GPIO_setQualificationMode(DEVICE_GPIO_PIN_FSI_RX1A, GPIO_QUAL_ASYNC);
}
FSI_performTxInitialization(FSITXA_BASE, PRESCALER_VAL);
FSI_performRxInitialization(FSIRXA_BASE);
txBufAddr = (uint16_t *)FSI_getTxBufferAddress(FSITXA_BASE);
rxBufAddr = (uint16_t *)FSI_getRxBufferAddress(FSIRXA_BASE);
}
void
FSI_configRxDelayLine_fix(uint32_t base, FSI_RxDelayTapType delayTapType,
uint16_t tapValue)
{
//
// Check the arguments.
//
ASSERT(FSI_isRxBaseValid(base));
ASSERT(tapValue <= FSI_RX_MAX_DELAY_LINE_VAL);
EALLOW;
switch(delayTapType)
{
case FSI_RX_DELAY_CLK:
HWREGH(base + FSI_O_RX_DLYLINE_CTRL) = (HWREGH(base + FSI_O_RX_DLYLINE_CTRL) &
(~FSI_RX_DLYLINE_CTRL_RXCLK_DLY_M)) |
(tapValue <<
FSI_RX_DLYLINE_CTRL_RXCLK_DLY_S);
break;
case FSI_RX_DELAY_D0:
HWREGH(base + FSI_O_RX_DLYLINE_CTRL) = (HWREGH(base + FSI_O_RX_DLYLINE_CTRL) &
(~FSI_RX_DLYLINE_CTRL_RXD0_DLY_M)) |
(tapValue <<
FSI_RX_DLYLINE_CTRL_RXD0_DLY_S);
break;
case FSI_RX_DELAY_D1:
HWREGH(base + FSI_O_RX_DLYLINE_CTRL) = (HWREGH(base + FSI_O_RX_DLYLINE_CTRL) &
(~FSI_RX_DLYLINE_CTRL_RXD1_DLY_M)) |
(tapValue <<
FSI_RX_DLYLINE_CTRL_RXD1_DLY_S);
break;
default:
//
// Invalid tap selection input
//
ASSERT(false);
break;
}
EDIS;
}
//
// fsiTxInt1ISR - FSI Tx Interrupt on INsT1 line
//
__interrupt void fsiTxInt1ISR(void)
{
fsiTxInt1Received = 1U;
txEventSts = FSI_getTxEventStatus(FSITXA_BASE);
//
// Clear the interrupt flag and issue ACK
//
FSI_clearTxEvents(FSITXA_BASE, FSI_TX_EVTMASK);
Interrupt_clearACKGroup(INTERRUPT_ACK_GROUP7);
}
//
// fsiTxInt2ISR - FSI Tx Interrupt on INT2 line
//
__interrupt void fsiTxInt2ISR(void)
{
fsiTxInt2Received = 1U;
txEventSts = FSI_getTxEventStatus(FSITXA_BASE);
//
// Clear the interrupt flag and issue ACK
//
FSI_clearTxEvents(FSITXA_BASE, FSI_TX_EVTMASK);
Interrupt_clearACKGroup(INTERRUPT_ACK_GROUP7);
disableAllFSIInterrupts();
//
// INT2 line is set to fire for error events, stop immediately. Actual Error
// is captured in txEventSts for debug
//
ESTOP0;
}
//
// fsiRxInt1ISR - FSI Rx Interrupt on INT1 line
//
__interrupt void fsiRxInt1ISR(void)
{
rxEventSts = FSI_getRxEventStatus(FSIRXA_BASE);
fsiRxInt1Received = 1U;
//
// Increment number of data frames received
//
if((rxEventSts & FSI_RX_EVT_DATA_FRAME) != 0)
{
//Data Frame was received
}
//
// Clear the interrupt flag and issue ACK
//
FSI_clearRxEvents(FSIRXA_BASE,rxEventSts);
Interrupt_clearACKGroup(INTERRUPT_ACK_GROUP7);
}
//
// fsiRxInt2ISR - FSI Rx Interrupt on INT2 line
//
__interrupt void fsiRxInt2ISR(void)
{
rxEventSts = FSI_getRxEventStatus(FSIRXA_BASE);
fsiRxInt2Received = fsiRxInt2Received + 1U;
totalRX2Interrupts++;
//
// Clear the interrupt flag and issue ACK
//
FSI_clearRxEvents(FSIRXA_BASE,rxEventSts);
Interrupt_clearACKGroup(INTERRUPT_ACK_GROUP7);
//
// INT2 line is set to fire for error events, stop immediately. Error
// is captured in rxEventSts for debug
//
// ESTOP0;
}
//
// disableAllFSIInterrupts - Disables all event interrupts in both FSI Tx/Rx,
// also clear them
//
void disableAllFSIInterrupts(void)
{
FSI_disableTxInterrupt(FSITXA_BASE, FSI_INT1, FSI_TX_EVTMASK);
FSI_disableTxInterrupt(FSITXA_BASE, FSI_INT2, FSI_TX_EVTMASK);
FSI_disableRxInterrupt(FSIRXA_BASE, FSI_INT1, FSI_RX_EVTMASK);
FSI_disableRxInterrupt(FSIRXA_BASE, FSI_INT2, FSI_RX_EVTMASK);
FSI_clearTxEvents(FSITXA_BASE, FSI_TX_EVTMASK);
FSI_clearRxEvents(FSIRXA_BASE, FSI_RX_EVTMASK);
}
//
// compare16 - Compares two 16 bit values and increments global error flag by 1
// for mismatch
//
static inline void compare16(uint16_t val1, uint16_t val2)
{
if(val1 != val2)
{
error++;
}
}
//
// Check the data package received by FSI
//
bool checkFSIPackageData()
{
uint16_t i;
uint16_t rxDataArray[FSI_NUM_WORDS];
FSI_readRxBuffer(FSIRXA_BASE, rxDataArray, FSI_NUM_WORDS, 0);
for (i = 0; i < FSI_NUM_WORDS; i++)
{
if (rxDataArray[i] != i)
{
return false;
}
}
return true;
}
//
// checkReceivedFrameTypeTag - Checks received frame type/tag and updates global
// error flag
//
void checkReceivedFrameTypeTag(FSI_FrameType type, FSI_FrameTag tag)
{
compare16((uint16_t)FSI_getRxFrameType(FSIRXA_BASE), (uint16_t)type);
if(type == FSI_FRAME_TYPE_PING)
{
compare16(FSI_getRxPingTag(FSIRXA_BASE), (uint16_t)tag);
}
else
{
compare16(FSI_getRxFrameTag(FSIRXA_BASE), (uint16_t)tag);
}
}
//
// initCPUTimers - This function initializes timer0
//
void
initCPUTimer(void)
{
//
// Initialize timer period to maximum
//
CPUTimer_setPeriod(CPUTIMER0_BASE, 0xFFFFFFFF);
//
// Initialize pre-scale counter to divide by 1 (SYSCLKOUT)
//
CPUTimer_setPreScaler(CPUTIMER0_BASE, 0);
//
// Make sure timer is stopped
//
CPUTimer_stopTimer(CPUTIMER0_BASE);
//
// Reload all counter register with period value
//
CPUTimer_reloadTimerCounter(CPUTIMER0_BASE);
//
// Reset interrupt counter
//
cpuTimer0IntCount = 0;
}
//
// configCPUTimer - This function initializes the selected timer to the
// period specified by the "freq" and "period" parameters. The "freq" is
// entered as Hz and the period in uSeconds. The timer is held in the stopped
// state after configuration.
//
void
configCPUTimer(uint32_t cpuTimer, float freq, float period)
{
uint32_t temp;
//
// Initialize timer period:
//
temp = (uint32_t)(freq / 1000000 * period);
CPUTimer_setPeriod(cpuTimer, temp - 1);
//
// Set pre-scale counter to divide by 1 (SYSCLKOUT):
//
CPUTimer_setPreScaler(cpuTimer, 0);
//
// Initializes timer control register. The timer is stopped, reloaded,
// free run disabled, and interrupt enabled.
// Additionally, the free and soft bits are set
//
CPUTimer_stopTimer(cpuTimer);
CPUTimer_reloadTimerCounter(cpuTimer);
CPUTimer_setEmulationMode(cpuTimer,
CPUTIMER_EMULATIONMODE_STOPAFTERNEXTDECREMENT);
CPUTimer_enableInterrupt(cpuTimer);
//
// Resets interrupt counters for the three cpuTimers
//
if (cpuTimer == CPUTIMER0_BASE)
{
cpuTimer0IntCount = 0;
}
}
//
// cpuTimer0ISR - Counter for CpuTimer0
//
__interrupt void
cpuTimer0ISR(void)
{
if (cpuTimer0IntCount < PING_TIMEOUT_VALUE)
{
cpuTimer0IntCount++;
}
//
// Acknowledge this interrupt to receive more interrupts from group 1
//
Interrupt_clearACKGroup(INTERRUPT_ACK_GROUP1);
}
//
// End of File
//
Modified fsi_ex14_dual_line_delay_select_tx:
//#############################################################################
//
// FILE: fsi_dual_line_delay_select_tx.c
//
// TITLE: FSI Skew Calibration in Dual Data Line Mode (TX Device)
//
//! \addtogroup driver_example_list
//! <h1>FSI Skew Calibration in Dual Data Line Mode (TX Device)</h1>
//!
//! In order to understand this example better and visualize the results
//! please refer to: [Fast Serial Interface (FSI) Skew
//! Compensation](http://www.ti.com/lit/an/spracj9/spracj9.pdf)
//!
//! Companion: fsi_dual_line_delay_select_rx
//! This example configures the FSI module to transmit pings at dual data rate
//! (using RXD0 and RXD1). Run the C28x device with this application first then
//! run the core with the fsi_dual_line_delay_select_rx application.
//! This example must be used with fsi_dual_line_delay_select_rx
//!
//! In fsi_dual_line_delay_select_rx example, the FSI module is configured
//! to listen for a ping at dual data rate (using both RXD0 and RXD1).
//! The software tests whether the ping sent from the TX
//! device is correctly received against all combinations of delay elements activated.
//! RXD0: 0-31 delay elements activated
//! RXD1: 0-31 delay elements activated
//! RXCLK: 0-31 delay elements activated
//! The software stores the status of the ping received (fail/pass) for each of the
//! 32x32x32 combinations of the delay line elements. This result can be graphed using
//! the FSI Skew Compensation Utility.
//!
//!\b External \b Connections \n
//! For FSI external connection, make below GPIO settings in
//! example code.
//!
//! ControlCard FSI Header GPIOs:
//! - GPIO_27 -> FSITXA_CLK
//! - GPIO_26 -> FSITXA_TX0
//! - GPIO_25 -> FSITXA_TX1
//! - GPIO_9 -> FSIRXA_CLK
//! - GPIO_8 -> FSIRXA_RX0
//! - GPIO_10 -> FSIRXA_RX1
//!
//! LaunchPad FSI Header GPIOs:
//! - GPIO_7 -> FSITX_CLK
//! - GPIO_6 -> FSITX_TX0
//! - GPIO_25 -> FSITX_TX1
//! - GPIO_33 -> FSIRX_CLK
//! - GPIO_12 -> FSIRX_RX0
//! - GPIO_2 -> FSIRX_RX1
//!
//!
//
//#############################################################################
//
//
// $Copyright:
// Copyright (C) 2024 Texas Instruments Incorporated - http://www.ti.com/
//
// Redistribution and use in source and binary forms, with or without
// modification, are permitted provided that the following conditions
// are met:
//
// Redistributions of source code must retain the above copyright
// notice, this list of conditions and the following disclaimer.
//
// Redistributions in binary form must reproduce the above copyright
// notice, this list of conditions and the following disclaimer in the
// documentation and/or other materials provided with the
// distribution.
//
// Neither the name of Texas Instruments Incorporated nor the names of
// its contributors may be used to endorse or promote products derived
// from this software without specific prior written permission.
//
// THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
// "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
// LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR
// A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT
// OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL,
// SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT
// LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE,
// DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY
// THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT
// (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
// OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
// $
//#############################################################################
//
// Included Files
//
#include "driverlib.h"
#include "device.h"
#define PRESCALER_VAL FSI_PRESCALE_50MHZ
#define COUNTER_TIMEOUT 200
#define FSI_PACKAGE_COUNT 16
#define FSI_NUM_WORDS 6
// Transfer can be happen over single or double lane
FSI_DataWidth nLanes = FSI_DATA_WIDTH_2_LANE;
// Frame tag used with Data/Ping transfers
FSI_FrameTag txDataFrameTag = FSI_FRAME_TAG10;
// User data to be sent with Data frame
uint16_t txUserData = 0x47;
uint16_t *txBufAddr = 0, *rxBufAddr = 0;
uint16_t txEventSts = 0, rxEventSts = 0;
uint16_t txBufData[16] = {0};
volatile uint32_t fsiTxInt1Received = 0,fsiTxInt2Received = 0;
volatile uint32_t fsiRxInt1Received = 0,fsiRxInt2Received = 0;
uint32_t rxTimeOutCntr = COUNTER_TIMEOUT;
uint32_t error = 0;
//
// Function Prototypes
//
static inline void compare16(uint16_t val1, uint16_t val2);
void disableAllFSIInterrupts(void);
void checkReceivedFrameTypeTag(FSI_FrameType type, FSI_FrameTag tag);
void initFSI(void);
void prepareTxBufData(void);
__interrupt void fsiTxInt1ISR(void);
__interrupt void fsiTxInt2ISR(void);
__interrupt void fsiRxInt1ISR(void);
__interrupt void fsiRxInt2ISR(void);
//
// Main
//
void main(void)
{
//
// Initialize device clock and peripherals
//
Device_init();
//
// Disable pin locks and enable internal pullups.
//
Device_initGPIO();
//
// Initialize PIE and clear PIE registers. Disables CPU interrupts.
//
Interrupt_initModule();
//
// Initialize the PIE vector table with pointers to the shell Interrupt
// Service Routines (ISR).
//
Interrupt_initVectorTable();
//
// Interrupts that are used in this example are re-mapped to ISR functions
// found within this file. Total 4; FSI Tx/Rx :: INT1/INT2
//
Interrupt_register(INT_FSITXA1, &fsiTxInt1ISR);
Interrupt_register(INT_FSITXA2, &fsiTxInt2ISR);
Interrupt_register(INT_FSIRXA1, &fsiRxInt1ISR);
Interrupt_register(INT_FSIRXA2, &fsiRxInt2ISR);
//
// Initialize basic settings for FSI
//
initFSI();
FSI_setRxDataWidth(FSIRXA_BASE, nLanes);
FSI_setTxDataWidth(FSITXA_BASE, nLanes);
//
// Enable FSI Tx/Rx interrupts
//
Interrupt_enable(INT_FSITXA1);
Interrupt_enable(INT_FSITXA2);
Interrupt_enable(INT_FSIRXA1);
Interrupt_enable(INT_FSIRXA2);
//
// Enable Global Interrupt (INTM) and realtime interrupt (DBGM)
//
EINT;
ERTM;
//
// Enable normal data transfer events to be sent over INT1 line
//
FSI_enableTxInterrupt(FSITXA_BASE, FSI_INT1, FSI_TX_EVT_FRAME_DONE);
FSI_enableRxInterrupt(FSIRXA_BASE, FSI_INT1, FSI_RX_EVT_PING_FRAME);
//
// Wait till interrupt is received on FSIRX INT1 line, verify it's for FRAME
// DONE event for PING Frame reception
//
while(1)
{
while(1)
{
//
// Send the flush sequence
//
FSI_executeTxFlushSequence(FSITXA_BASE, PRESCALER_VAL);
//
// Send a ping frame with frame tag 0000b
//
FSI_setTxFrameTag(FSITXA_BASE, FSI_FRAME_TAG0);
FSI_setTxFrameType(FSITXA_BASE, FSI_FRAME_TYPE_PING);
FSI_startTxTransmit(FSITXA_BASE);
while(fsiRxInt1Received != 1U && rxTimeOutCntr != 0U)
{
DEVICE_DELAY_US(1);
rxTimeOutCntr--;
}
if(rxTimeOutCntr == 0)
{
rxTimeOutCntr = COUNTER_TIMEOUT;
continue;
}
else
{
compare16(rxEventSts, (FSI_RX_EVT_PING_FRAME | FSI_RX_EVT_FRAME_DONE));
checkReceivedFrameTypeTag(FSI_FRAME_TYPE_PING, FSI_FRAME_TAG1);
//
// If received frame type and tag matches, exit this loop and proceed
// to next step by sending flush sequence, otherwise clear error and
// interrupt flag and continue looping.
//
if(error == 0)
{
fsiRxInt1Received = 0;
break;
}
fsiRxInt1Received = 0;
error = 0;
}
}
//
// Send a ping frame with frame tag 0001b
//
FSI_setTxFrameTag(FSITXA_BASE, FSI_FRAME_TAG1);
FSI_setTxFrameType(FSITXA_BASE, FSI_FRAME_TYPE_PING);
FSI_startTxTransmit(FSITXA_BASE);
DEVICE_DELAY_US(100);
FSI_setTxSoftwareFrameSize(FSITXA_BASE, FSI_NUM_WORDS);
FSI_setTxDataWidth(FSITXA_BASE, nLanes);
FSI_setTxUserDefinedData(FSITXA_BASE, txUserData);
FSI_setTxFrameTag(FSITXA_BASE, txDataFrameTag);
FSI_setTxFrameType(FSITXA_BASE, FSI_FRAME_TYPE_NWORD_DATA);
FSI_setTxBufferPtr(FSITXA_BASE, 0U);
//
// Now, start transmitting data frames
//
uint16_t packageCount = 0;
fsiTxInt1Received = 0;
while(packageCount < FSI_PACKAGE_COUNT)
{
//
// Write data into Tx buffer and set other Frame specific fields
//
prepareTxBufData();
FSI_writeTxBuffer(FSITXA_BASE, txBufData, FSI_NUM_WORDS, 0U);
//
// Start Transfer
//
FSI_startTxTransmit(FSITXA_BASE);
while(fsiTxInt1Received != 1);
//
// Re-initialize flags and buffer pointer before next transmission
//
fsiTxInt1Received = 0U;
FSI_setTxBufferPtr(FSITXA_BASE, 0U);
DEVICE_DELAY_US(100);
packageCount++;
}
}
}
//
// initFSI - Initializes FSI Tx/Rx with internal loopback and also sends FLUSH
// sequence.
//
void initFSI(void)
{
FSI_disableRxInternalLoopback(FSIRXA_BASE);
//
// NOTE: External loopback, Modify GPIO settings as per setup
//
GPIO_setPinConfig(DEVICE_GPIO_CFG_FSI_TXCLK);
GPIO_setPinConfig(DEVICE_GPIO_CFG_FSI_TX0);
GPIO_setPinConfig(DEVICE_GPIO_CFG_FSI_RXCLKA);
GPIO_setPinConfig(DEVICE_GPIO_CFG_FSI_RX0A);
if(nLanes == FSI_DATA_WIDTH_2_LANE)
{
GPIO_setPinConfig(DEVICE_GPIO_CFG_FSI_TX1);
GPIO_setPinConfig(DEVICE_GPIO_CFG_FSI_RX1A);
}
//
// Set RX GPIO to be asynchronous
// (pass through without delay)
// Default setting is to have 2 SYS_CLK cycles delay
//
GPIO_setQualificationMode(DEVICE_GPIO_PIN_FSI_RX0A, GPIO_QUAL_ASYNC);
GPIO_setQualificationMode(DEVICE_GPIO_PIN_FSI_RXCLKA, GPIO_QUAL_ASYNC);
if(nLanes == FSI_DATA_WIDTH_2_LANE)
{
GPIO_setQualificationMode(DEVICE_GPIO_PIN_FSI_RX1A, GPIO_QUAL_ASYNC);
}
//
// Perform FSI Tx and Rx initialization
//
FSI_performTxInitialization(FSITXA_BASE, PRESCALER_VAL);
FSI_performRxInitialization(FSIRXA_BASE);
txBufAddr = (uint16_t *)FSI_getTxBufferAddress(FSITXA_BASE);
rxBufAddr = (uint16_t *)FSI_getRxBufferAddress(FSIRXA_BASE);
}
//
// prepareTxBufData - Update array which is used as source to Tx data buffer
//
void prepareTxBufData(void)
{
uint16_t i;
for(i = 0; i < FSI_NUM_WORDS; i++)
{
txBufData[i] = i;
}
}
//
// fsiTxInt1ISR - FSI Tx Interrupt on INsT1 line
//
__interrupt void fsiTxInt1ISR(void)
{
fsiTxInt1Received = 1U;
txEventSts = FSI_getTxEventStatus(FSITXA_BASE);
//
// Clear the interrupt flag and issue ACK
//
FSI_clearTxEvents(FSITXA_BASE, FSI_TX_EVTMASK);
Interrupt_clearACKGroup(INTERRUPT_ACK_GROUP7);
}
//
// fsiTxInt2ISR - FSI Tx Interrupt on INT2 line
//
__interrupt void fsiTxInt2ISR(void)
{
fsiTxInt2Received = 1U;
txEventSts = FSI_getTxEventStatus(FSITXA_BASE);
//
// Clear the interrupt flag and issue ACK
//
FSI_clearTxEvents(FSITXA_BASE, FSI_TX_EVTMASK);
Interrupt_clearACKGroup(INTERRUPT_ACK_GROUP7);
disableAllFSIInterrupts();
//
// INT2 line is set to fire for error events, stop immediately. Actual Error
// is captured in txEventSts for debug
//
ESTOP0;
}
//
// fsiRxInt1ISR - FSI Rx Interrupt on INT1 line
//
__interrupt void fsiRxInt1ISR(void)
{
rxEventSts = FSI_getRxEventStatus(FSIRXA_BASE);
fsiRxInt1Received = 1U;
//
// Clear the interrupt flag and issue ACK
//
FSI_clearRxEvents(FSIRXA_BASE,rxEventSts);
Interrupt_clearACKGroup(INTERRUPT_ACK_GROUP7);
}
//
// fsiRxInt2ISR - FSI Rx Interrupt on INT2 line
//
__interrupt void fsiRxInt2ISR(void)
{
rxEventSts = FSI_getRxEventStatus(FSIRXA_BASE);
fsiRxInt2Received = fsiRxInt2Received + 1U;
//
// Clear the interrupt flag and issue ACK
//
FSI_clearRxEvents(FSIRXA_BASE,rxEventSts);
Interrupt_clearACKGroup(INTERRUPT_ACK_GROUP7);
disableAllFSIInterrupts();
//
// INT2 line is set to fire for error events, stop immediately. Error
// is captured in rxEventSts for debug
//
ESTOP0;
}
//
// disableAllFSIInterrupts - Disables all event interrupts in both FSI Tx/Rx,
// also clear them
//
void disableAllFSIInterrupts(void)
{
FSI_disableTxInterrupt(FSITXA_BASE, FSI_INT1, FSI_TX_EVTMASK);
FSI_disableTxInterrupt(FSITXA_BASE, FSI_INT2, FSI_TX_EVTMASK);
FSI_disableRxInterrupt(FSIRXA_BASE, FSI_INT1, FSI_RX_EVTMASK);
FSI_disableRxInterrupt(FSIRXA_BASE, FSI_INT2, FSI_RX_EVTMASK);
FSI_clearTxEvents(FSITXA_BASE, FSI_TX_EVTMASK);
FSI_clearRxEvents(FSIRXA_BASE, FSI_RX_EVTMASK);
}
//
// compare16 - Compares two 16 bit values and increments global error flag by 1
// for mismatch
//
static inline void compare16(uint16_t val1, uint16_t val2)
{
if(val1 != val2)
{
error++;
}
}
//
// checkReceivedFrameTypeTag - Checks received frame type/tag and updates global
// error flag
//
void checkReceivedFrameTypeTag(FSI_FrameType type, FSI_FrameTag tag)
{
compare16((uint16_t)FSI_getRxFrameType(FSIRXA_BASE), (uint16_t)type);
if(type == FSI_FRAME_TYPE_PING)
{
compare16(FSI_getRxPingTag(FSIRXA_BASE), (uint16_t)tag);
}
else
{
compare16(FSI_getRxFrameTag(FSIRXA_BASE), (uint16_t)tag);
}
}
//
// End of File
//