Part Number: TMS320F2800157
Other Parts Discussed in Thread: DRV8353
Tool/software:
Hello team,
I am working on implementation of the torque control mode in ENOCDER estimator method under build level 4.
For this activity I am using DRV8353 EVM with F2800157 launchpad and 24V encoder motor.
We can be able to run the motor in speed control mode in all build levels, and I can be able to achieve maximum speed in speed control mode.
First, I considered build level 3 as the torque control mode but in one of my E2E query, they mentioned it is just a current closed loop does not torque control mode.
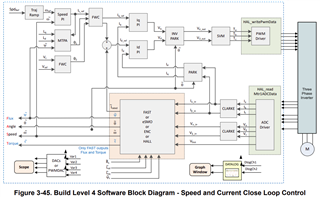
In speed control mode, we are demanding the speed and based on that Id and Iq currents are injected to the module in order to achieve that speed, as mentioned in below block diagram.
1. As I know, in torque control mode we should inject Id and Iq currents, based on this motor speed should increase accordingly. Is this proper torque control mode?
2. If any document is there regarding implementation of the torque control mode under ENCODER or HALL estimator methods, please provide the same or please mention how to implement this in build level 4.
3. Can we able to use speed control mode in vehicle level? If yes, please mention how to achieve maximum torque in speed control mode at lower RPM because in speed mode we are injecting Id and Iq currents based on speed. Our requirement is MCU should inject current instantly in order to achieve the torque demand at starting of the motor.
4. How to achieve sudden Id and Iq current demand in speed control mode in high torque region? Can we able to inject these currents in speed mode instead of taking it based on speed.
Thank you,
Regards,
Kirana H P