


Part Number: TMS320F28388D
Other Parts Discussed in Thread: SYSCONFIG
Tool/software:
Hi all,
I'm using a TMS320F28388D and working on receiving data through the CAN bus.
In polling mode, I'm successfully receiving CAN messages using a while loop.
However, when I configure the CAN peripheral for interrupt mode, the receive interrupt is never triggered, and no data is received.
To test the setup, I’m sending CAN messages from a Microchip CAN Bus Analyzer Tool. The messages are received correctly in polling mode, but not in interrupt mode.
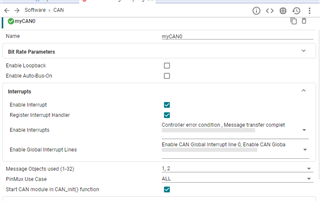
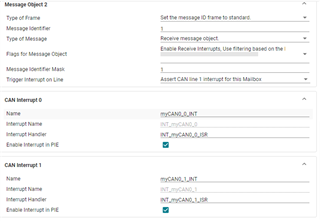
CAN Peripheral: Configured via syscfg
Test Setup: Microchip CAN Bus Analyzer is used to send messages
Observation:
Polling mode works fine (data is received)
Interrupt mode doesn’t work:
No interrupt fires
No data received
Below is the configuration of Sys config
Thanks

