Part Number: TMS320F2800156-Q1
Tool/software:
Hi Team,
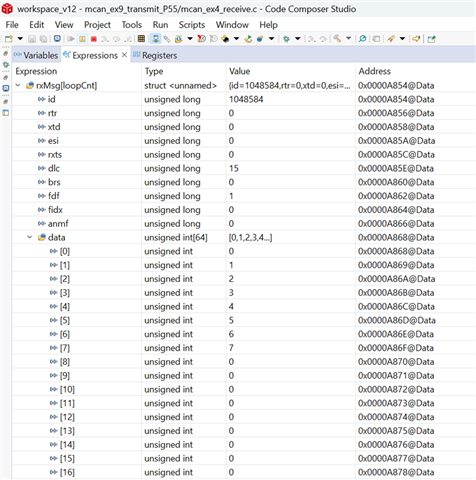
I am currently working on the F2800156-Q1 (32-pin) microcontroller for a PMSM controller project. We have developed the code for Motor controller logic using the bitfield format but the MCAN communication code part is done in driver-lib format since there are no bitfield examples on MCAN at this point. Please assist me how merge Bitfield code & Driver-lib code in one CCS project?
Regards
Shivani