Other Parts Discussed in Thread: C2000WARE
Tool/software:
Hi champs,
I am asking this for our customer.
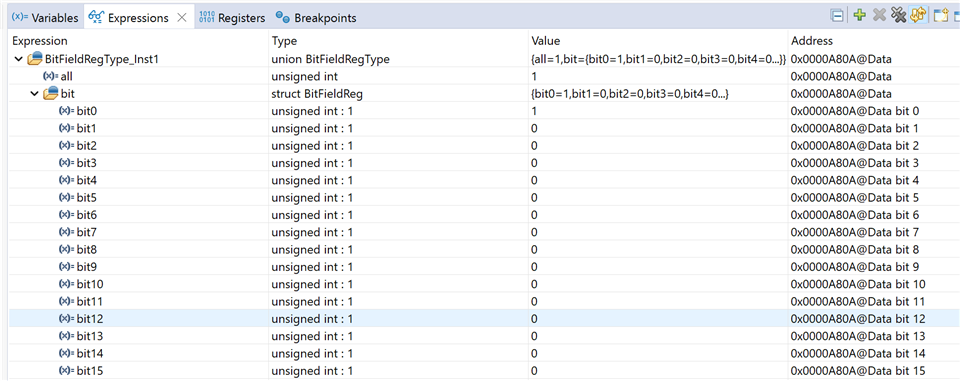
The user uses bit-field based structure for their flag usage.
Now, they want to know if a bit inside an uint16_t variable is changed or not during runtime.
Is it possible for CCS to monitor if a bit inside an uint16_t variable is changed during runtime?
The challenge here is the other 15 bits of the same unit16_t variable can be changed.
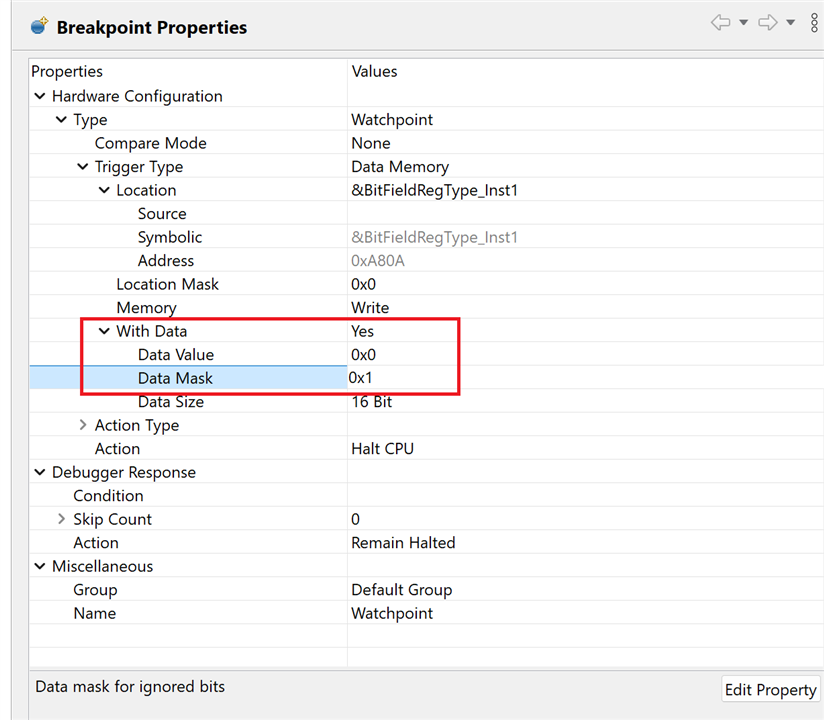
The user tried to use CCS hardware watchpoint to monitor the variable, but it will break as along as any bit of the variable is changed.
The user wants to monitor bit 4 of the variable only.
Or do you have any other suggestion?