Other Parts Discussed in Thread: BOOSTXL-3PHGANINV
Tool/software:
I am using LAUNCHXL-F28P55X with BOOSTXL-3PHGANINV and the project dual_axis_servo_drive_fcl_qep_f28p55x
In "dual_axis_servo_drive.c" declaring "motorVars[0]" and "motorVars[1]" the two motors are initialised:

I only have one motor, so I want to deactivate all the code concerning the second one.
Is it enough for me to comment on the second function?
Is there anything else I need to do?
..I don't want to waste resources by running portions of code in the background for an motor that I don't use
I also have another question:
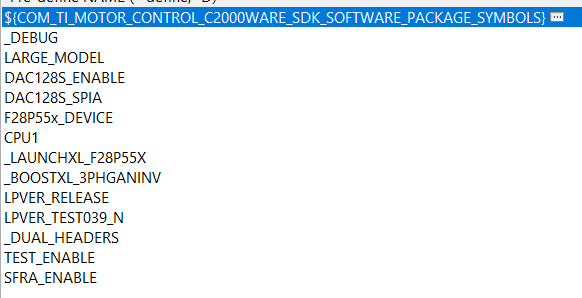
Here I have to activate/deactivate something?
I see for instance a '_' before BOOSTXL-3PHGANINV, should it be removed?
Thanks