


I am using the F28035 controlCARD to read an analog sensor signal which is the feedback for a very sensitive control loop.
I'm more interested in Precision than Accuracy because of how my system works.
I was having a lot of problems with the ADC and started perusing the forums here to see if anyone else had similar issues. Many people pointed to the Errata and even though I am only sampling 1 signal and not a series of channels I decided to see if the "ADC: Initial Conversion" error was what I was experiencing.
I set up the controlCARD with the docking station connected to my computer via the USB. Nothing else connected to the dock. I then grounded the ADC.B5 pin to the ground plane on the docking station.
I set up my code to convert B5 three times whenever my ISR interrupt occurs (79kHz)
I compared the first ADC result to the second and third and noticed that the 2nd and 3rd were always much closer to each other in value. By throwing away the first conversion and averaging the next two samples I saw a reduction in the spread of my ADC conversion.

FIGURE1: Top = conversion1, Bot = conversion2,3 avg
However I still see occasional errors where the signal seems to jump or drop towards ground. This has devastating effects on my controller's stability. When I'm running my system I tend to see something like the image below which causes the system to crash.
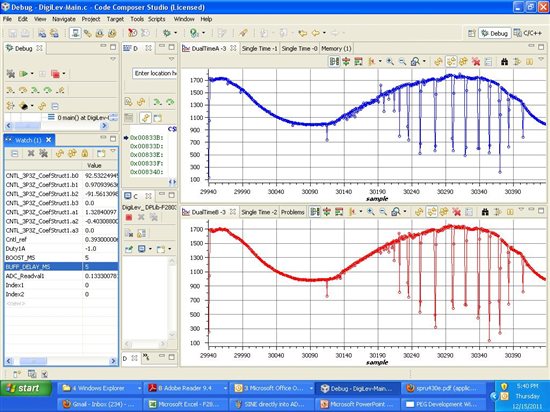
FIGURE2: Top = conversion1, Bot = conversion2,3 avg
Can anyone suggest a reason why I may see this behavior from time to time? I'm feeling a little stuck.
Matt
