Part Number: TMS320F28379D
Tool/software:
Hi all,
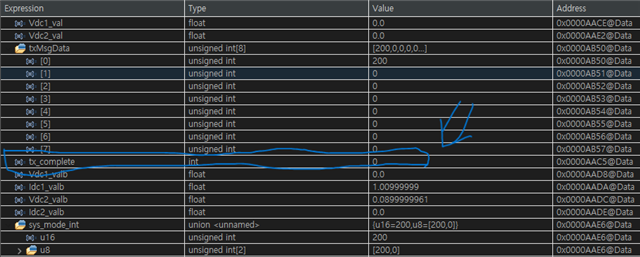
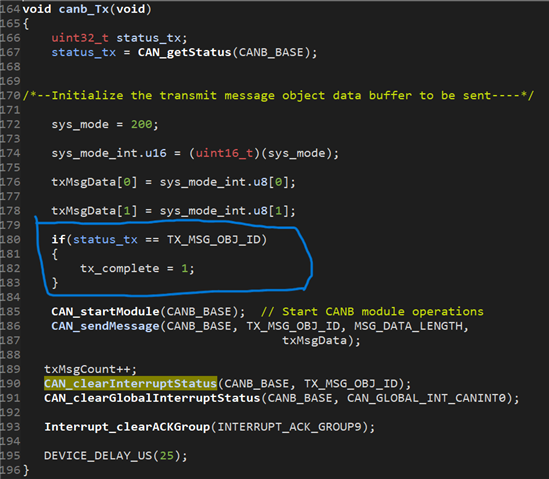
I am working with two TMS320F28379D DSPs (DSP1 and DSP2) communicating over the CANB channel, and I'm facing an issue where data transmission from DSP2 to DSP1 is not received, while the reverse direction (DSP1 to DSP2) works perfectly.
My questions is :"Why would DSP1 fail to receive data from DSP2, even though the reverse works?" . Please suggest how to resolve this issue. For your reference, screenshots are attached herewith.
Thanks and best regards,
Sameer