


Other Parts Discussed in Thread: C2000WARE
Tool/software:
Hi
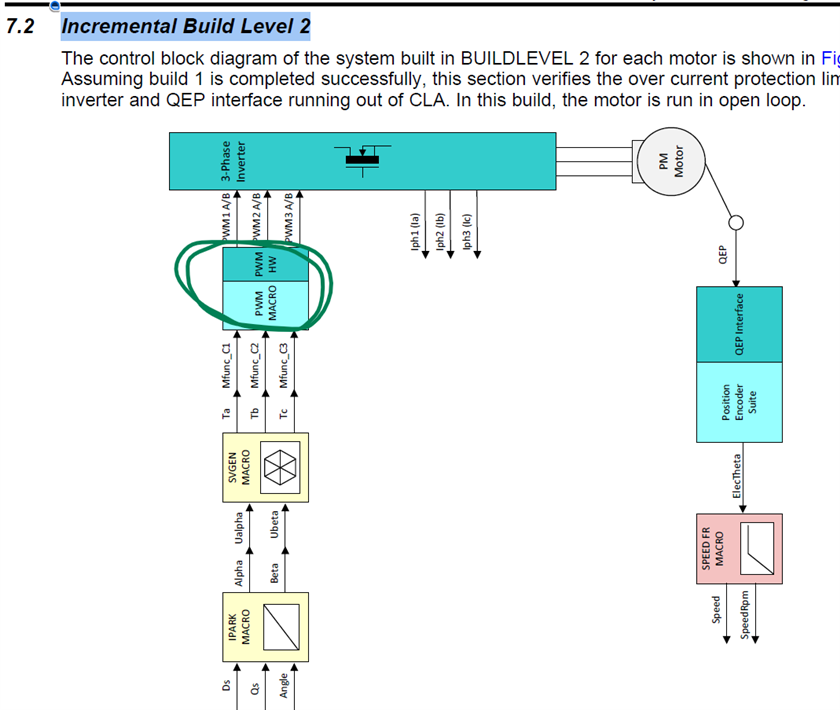
Where can I find the explanation and implementation of these two modules in the documents or in the dual_axis_servo_drive code?
Thanks
Tool/software:
Hi
Where can I find the explanation and implementation of these two modules in the documents or in the dual_axis_servo_drive code?
Thanks
