Tool/software:
Hello,
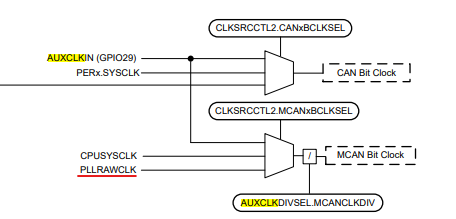
We currently have a product working with a can network at 1MHz and 5MHz fro nominal and data bit rates respectively. We are using a MCAN clock of 40MHHz with a sysclk of 120MHz. however we intend to increase thew total network nodes and we are wondering if we can increase CAN speed to at least 2MHz and 8MHz for nominal and data bit rates.However, we have quite a lot of questions regarding the module.
- We would like to increase the MCAN clock to 120MHz so the CAN bit timinig calculator can give us a feasible configuration to use in the MCAN module. Would this produce any kind of issue? Does th MCAN module need to go slower than the application code to properly work? If so, which would be a proper rule of thumb to follow regarding how much faster needs the app to be compared to MCAN?
- Is it compulsory to use clock values like the ones found in PCAN or even in the CAN standard like 80MHz, 60MHz, etc?
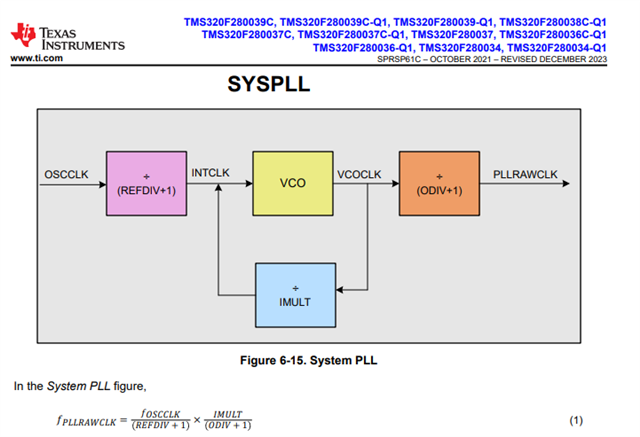
- If not possible to use 120MHz as MCAN clock, is there any way to have a clock of a standarized value like 80 MHz without the need of having a mcu of a much faster SysClk?
- can 2 different nodes live together in the same can network with different MCAN clock speeds? How much can differ the sampling point from 2 different nodes? If so, which are the parameters that matter the most in order to allow a robust communication with different MCAN clocks?
Regards,
David