Tool/software:
I'm using BoostXL3PhGaN with LAUNCHXL-F28P55X. The project is dual_axis_servo_drive with PMSM motor KBMS 43 H03 B11 model
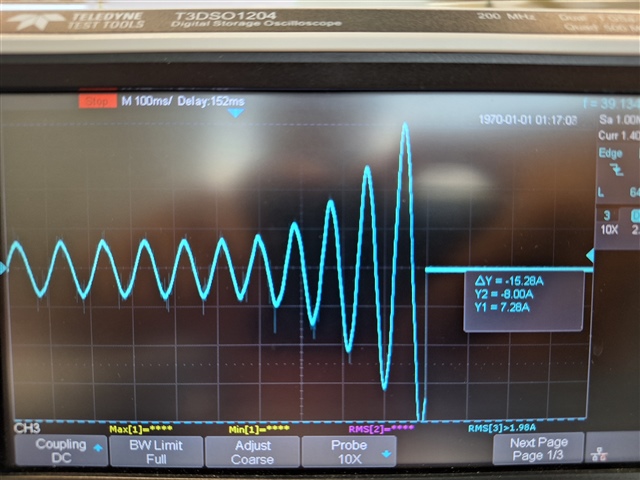
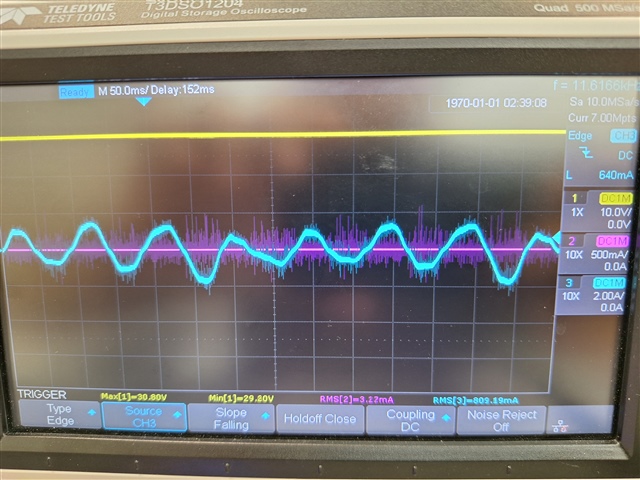
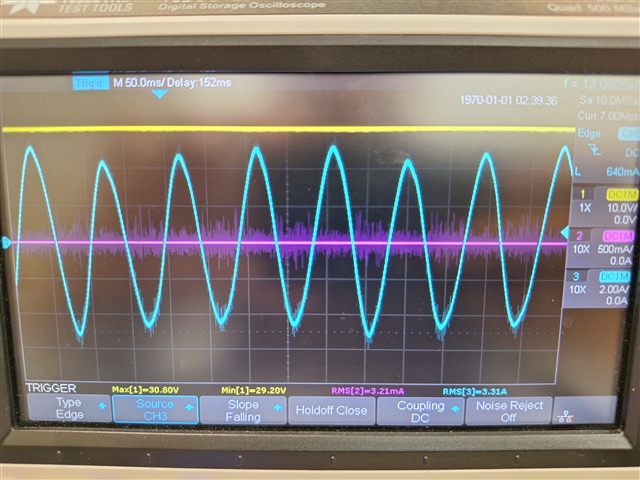
1) Why when I increase IdRef the shape of the phase current of the motor (seen on oscilloscope) becomes much more sinusoidal (much nicer)
2) Why when I increase IdRef the amplitude of the phase current of the motor (seen on oscilloscope) becomes much higher?
3) Is it correct that being PMSM, I should leave IdRef = 0 ?
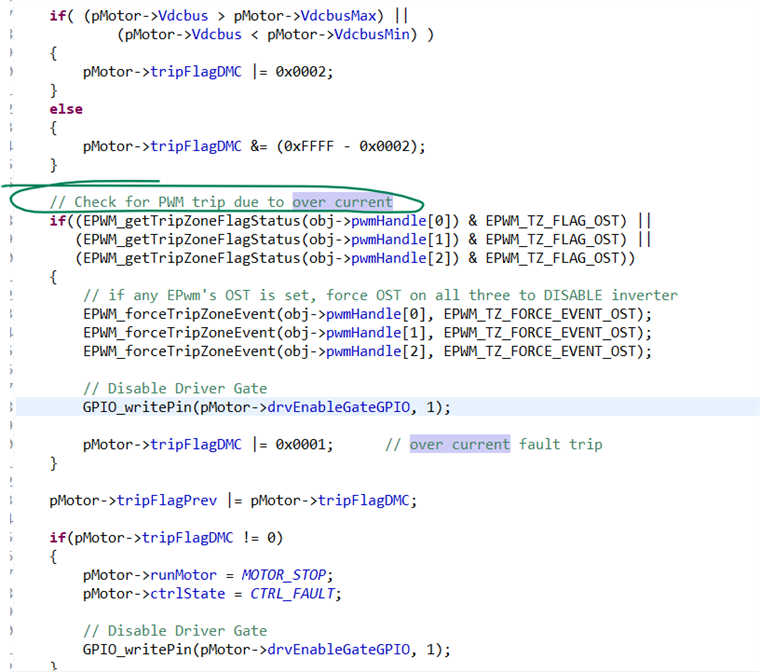
4) Does this overcurrent refer to excess current on the DC bus or on the motor phase?