


Part Number: TMS320F28388D
Other Parts Discussed in Thread: SYSCONFIG, TMDSCNCD28388D
Hi,
I am developping a battery charger using an F28388D. However, for some strange reason, I can't get ADC B, C and D to work. I have checked everything I can think of, and I don't see any significant configuration difference between ADCs, and yet only ADC A returns results. I have checked voltage on the pins of the controlcard I am using, the signal is there (and even if it wasn't, I should see some noise on the ADCRESULT).
(Note : despite using an F28388D, I use only core 1, and only run the CPU1 project)
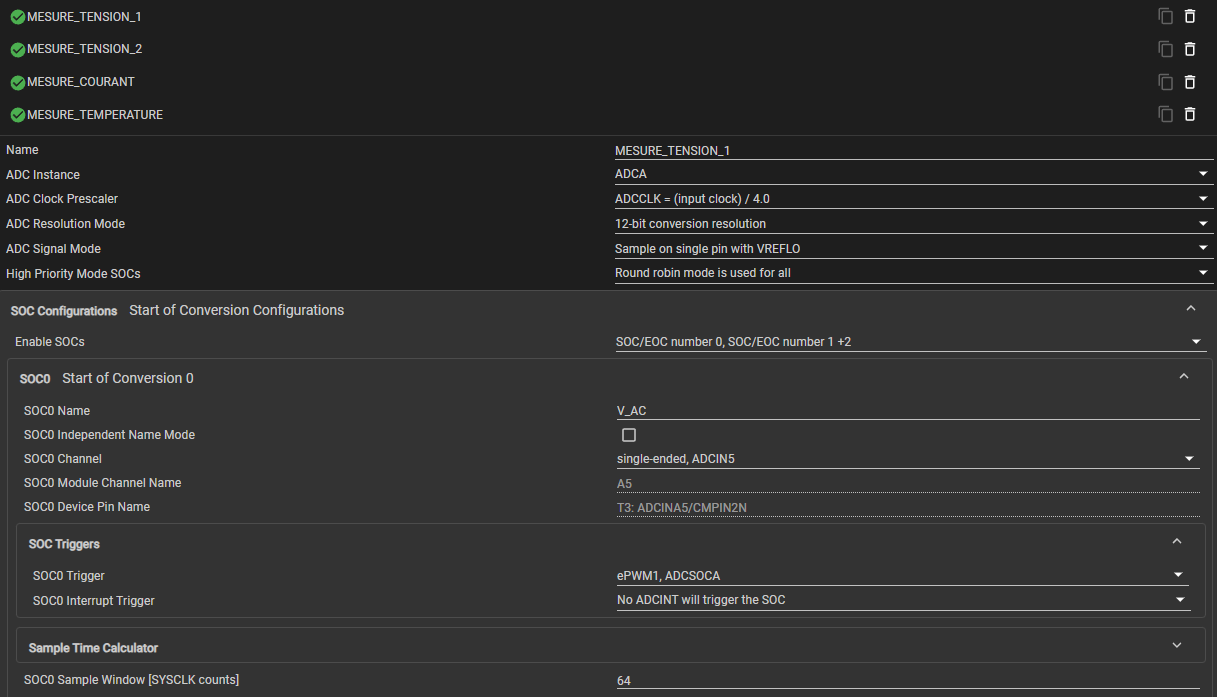
ADC A configuration :
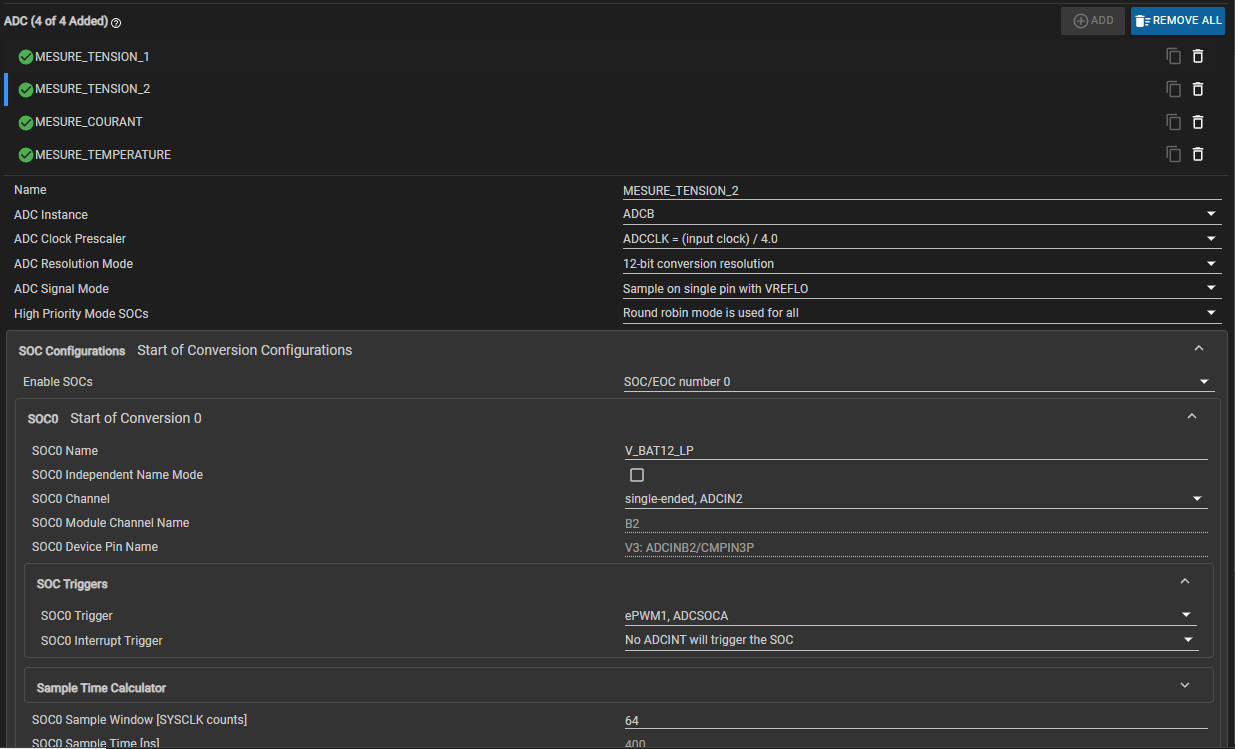
ADC B configuration :
All ADCs are powered :

Core allocation of the ADCs : all CPU1

Any idea what could go wrong ?
Thanks in advance,
Best regards,
Adrien









