Part Number: TMS320F28377D
Other Parts Discussed in Thread: C2000WARE
Hello,
I am using the TI-TMS320F28377D for a motor drive application, on core 1 I have a standard CAN-Stack and on core 2 I have the motor drive specific software, the two cores exchange information over the IPC.
Everything works well, I can send CAN-messages over the mailbox 1 and I receive new CAN-messages over the mailbox 2.
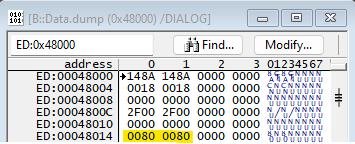
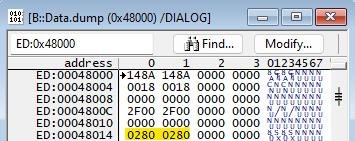
The problem is that I sporadically receive a message in the mailbox 32, but all other receive-mailboxes 3…31 are completely empty (no interrupt pending), how can this happen?
Why does the CAN controller send us a message in the mailbox 32?
Is this behaviour faulty or a regular process?
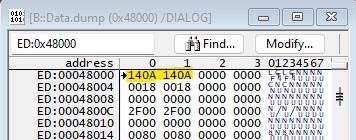
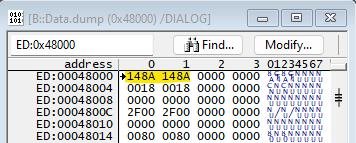
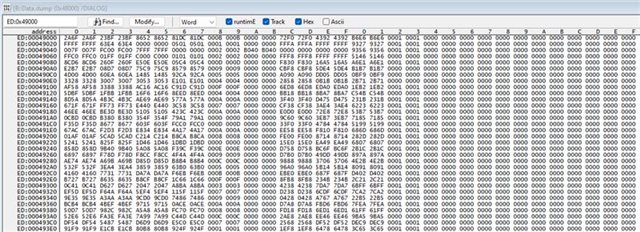
You can see this in the picture below, where I have used one counter for each mailbox, so that when a new message occurs, the counter will be incresed by one.

An additional question, why is interrupt triggeered so often with message number 0?
Thank you for your support.