


Part Number: TMS320F280037-Q1
Other Parts Discussed in Thread: SYSCONFIG, C2000WARE
Hi team,
I ask this for my customer.
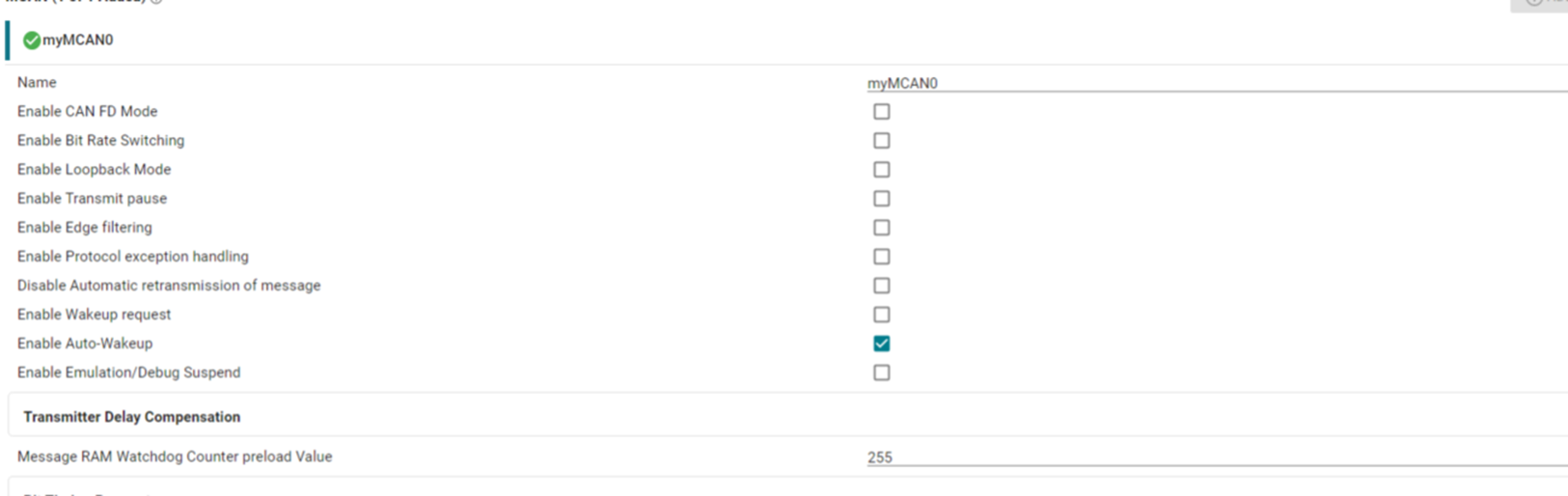
1.Do we have the MCAN demo based on sysconfig to realize the range filter, disable CAN-FD, Bit rate switching, bit rate is 500kbps. use FIFO to receive the message(range filter), blocking mode
2.In our sysconfig it seems it isn't have extend filter
3.If customer use RX buffer, they can't realize the range filter?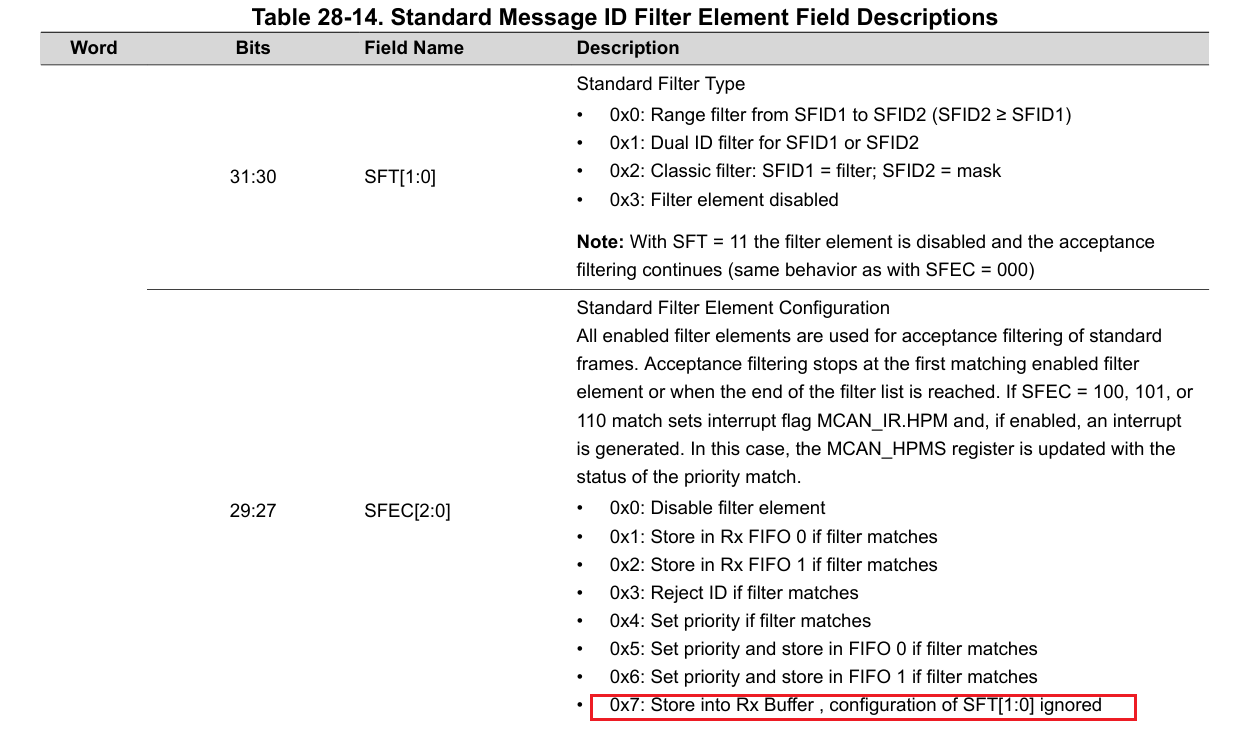
4. Customer try to use sysconfig to realize the CAN range filter
And they set below:
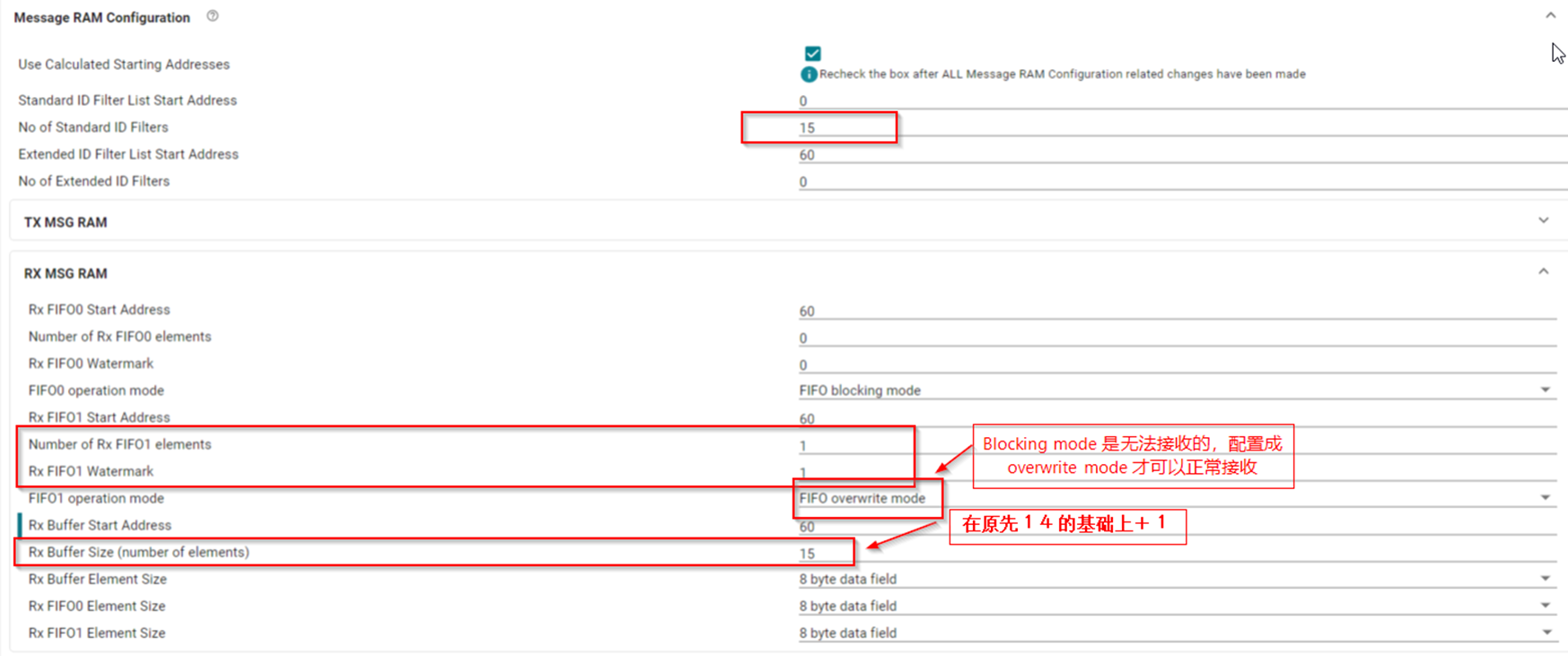
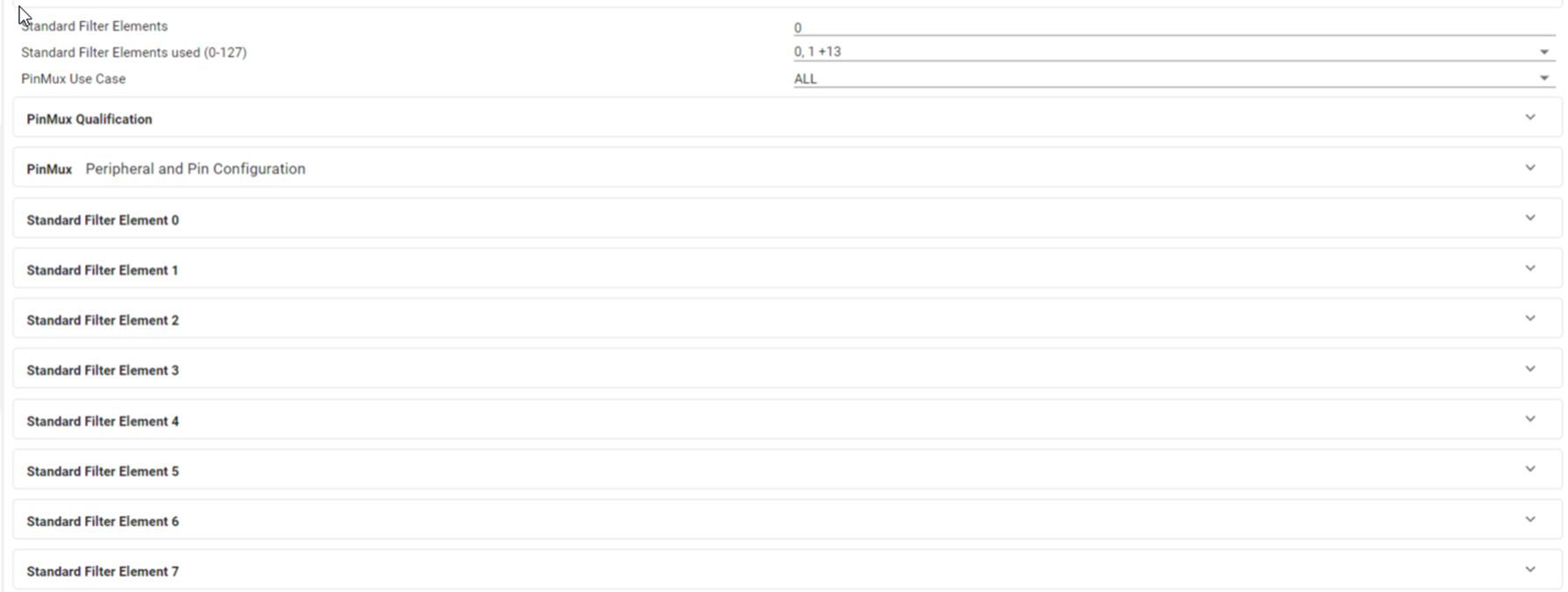

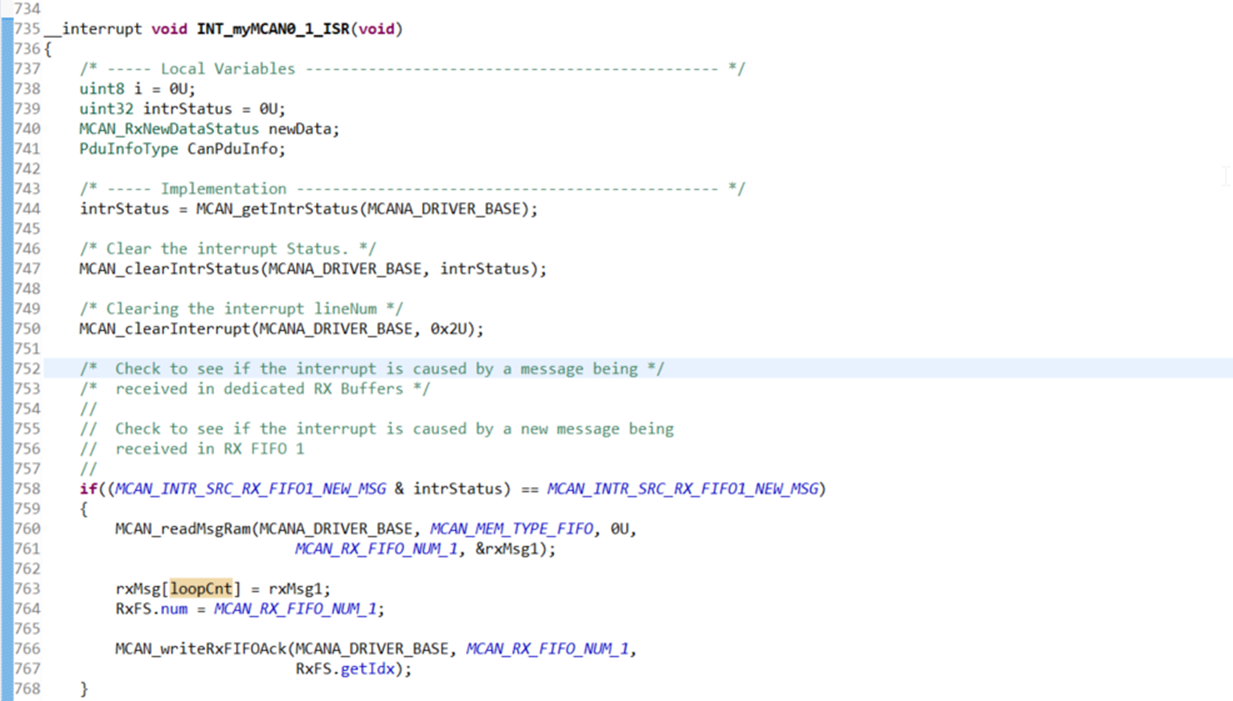
they use filter element 14 to realize the range fliter and store the data to FIFO, but they finds if they set the opreation mode to overwrite mode, it can receive the data; but if they change it to blocking mode, they just can receive one message frame. Could you help to check this? Is any other opreation needed to do if they use blocking mode? I compare the ISR operation between their code and mcan_ex8_range_filter_receive demo ISR code, don't find any difference
BRs
Shuqing











