



Hello All,
I am working on TMS320F280025C.
I want to transmit a data array from Docklight to the controller using RS485.
The data array is as follows:
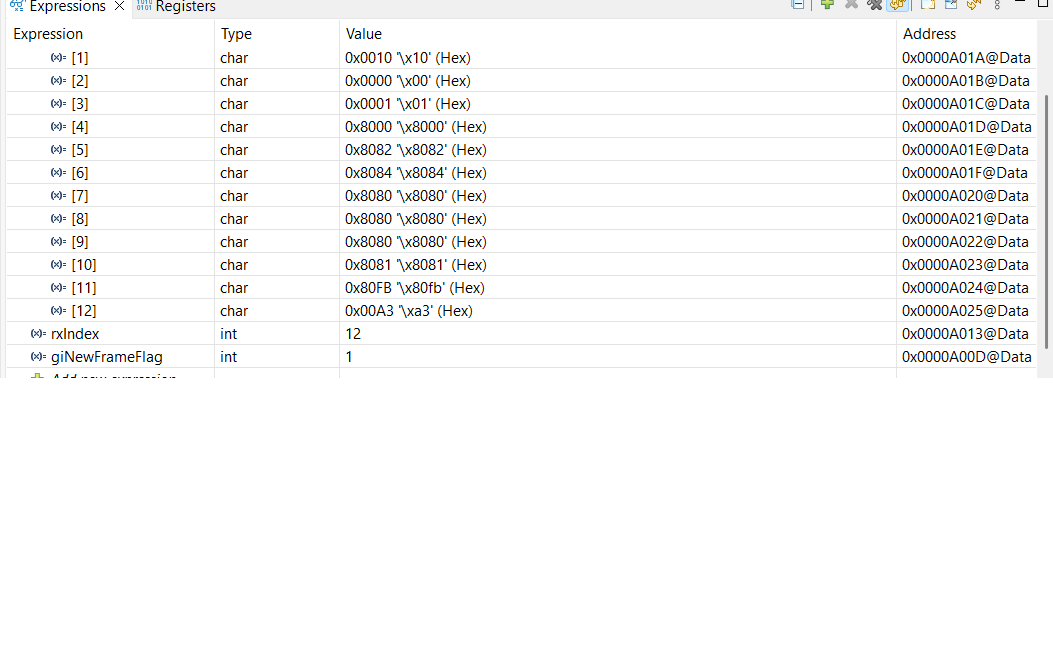
01 10 00 01 00 02 04 00 00 00 01 F3 A3
While receiving this data on the controller, I am facing an issue:
-
Sometimes the entire data frame is received correctly
-
Sometimes the data is received as shown in the attached screenshots (corrupted data)
-
Sometimes the data is correct except the last byte is missing
I am sharing my code below.
Please review the code and help me understand why this issue is occurring.
Baud Rate is 9600...
#include "F28x_Project.h"
#include "extern.h"
#include <stdint.h>
// Function Prototypes
void initSCIAEchoback(void);
void transmitSCIAChar(uint16_t a);
void transmitSCIAMessage(unsigned char * msg);
void initSCIAFIFO(void);
interrupt void sciaRxFifoIsr(void);
int a;
// Main
void main(void)
{
// Initialize device clock and peripherals
InitSysCtrl();
// Initialize GPIO
InitGpio();
// For this example, only init the pins for the SCI-A port.
// GPIO_SetupPinMux() - Sets the GPxMUX1/2 and GPyMUX1/2 register bits
// GPIO_SetupPinOptions() - Sets the direction and configuration of GPIOs
// These functions are found in the F28X7x_Gpio.c file.
GPIO_SetupPinMux(3, GPIO_MUX_CPU1, 9); // see datasheet page no.40... 9 is depend on that chart
GPIO_SetupPinOptions(3, GPIO_INPUT, GPIO_PULLUP);
GPIO_SetupPinMux(2, GPIO_MUX_CPU1, 9);
GPIO_SetupPinOptions(2, GPIO_OUTPUT, GPIO_ASYNC);
GPIO_SetupPinMux(7, GPIO_MUX_CPU1, 0);
GPIO_SetupPinOptions(7, GPIO_OUTPUT, GPIO_PUSHPULL);
// Disable CPU interrupts
DINT;
// Initialize the PIE control registers to their default state.
// The default state is all PIE interrupts disabled and flags
// are cleared.
InitPieCtrl();
// Disable CPU interrupts and clear all CPU interrupt flags
IER = 0x0000;
IFR = 0x0000;
// Initialize the PIE vector table with pointers to the shell Interrupt
// Service Routines (ISR)
InitPieVectTable();
// Interrupts that are used in this example are re-mapped to
// ISR functions found within this file.
EALLOW; // This is needed to write to EALLOW protected registers
PieVectTable.SCIA_RX_INT = &sciaRxFifoIsr;
EDIS; // This is needed to disable write to EALLOW protected registers
// Enable global Interrupts and higher priority real-time debug events:
IER = M_INT9 ; // For ADCA0,EPWM1 and for SCIC_RX
// Enable interrupts for SCI/UART required for this example
PieCtrlRegs.PIECTRL.bit.ENPIE = 1; // Enable the PIE block
PieCtrlRegs.PIEIER9.bit.INTx1 = 1; // PIE Group 9, INT1 SCI RX.. see page no. 96
initSCIAEchoback(); // Initialize SCI for echoback
GPIO_WritePin(7, 0); // RS485 receive
DELAY_US(1000);
EINT; // Enable Global interrupt INTM
ERTM; // Enable Global real-time interrupt DBGM
for(;;)
{
// modbus();
// while (SciaRegs.SCIFFTX.bit.TXFFST != 0) {}
// SciaRegs.SCITXBUF.all = 0xD7;
//
// DELAY_US(1000*1000); // 1s
// loopCounter++;
}
}
// initSCIAEchoback - Initialize SCI-A for echo-back
void initSCIAEchoback(void)
{
SciaRegs.SCICCR.all = 0x0007; // 1 stop bit, No loopback
// No parity, 8 char bits,
// async mode, idle-line protocol
SciaRegs.SCICTL1.all = 0x0003; // enable TX, RX, internal SCICLK,
// Disable RX ERR, SLEEP, TXWAKE
SciaRegs.SCICTL2.all = 0x0003;
SciaRegs.SCICTL2.bit.RXBKINTENA = 1;
// SCIA at 9600 baud
// @LSPCLK = 25 MHz (100 MHz SYSCLK) HBAUD = 0x01 and LBAUD = 0x44.
SciaRegs.SCIHBAUD.all = 0x0001;
SciaRegs.SCILBAUD.all = 0x0044;
SciaRegs.SCIFFTX.all = 0xE040;
SciaRegs.SCIFFRX.all = 0x0022;
SciaRegs.SCIFFCT.all = 0x0;
SciaRegs.SCIFFRX.bit.RXFIFORESET = 1;
SciaRegs.SCICTL1.all = 0x0023; // Relinquish SCI from Reset
}
// scicRxFifoIsr - Scic Receive FIFO ISR
interrupt void sciaRxFifoIsr(void)
{
// Wait for incoming character
// while(SciaRegs.SCIFFRX.bit.RXFFST == 0) {} //wait for empty state
// Get character
rxBuffer[rxIndex++] = (uint16_t)(SciaRegs.SCIRXBUF.all & 0x00FF);
if (rxIndex==13)
{
GPIO_WritePin(7, 0); // RX mode
DELAY_US(20);
rxIndex=0;
giNewFrameFlag=1;
a++;
}
SciaRegs.SCIFFRX.bit.RXFFOVRCLR=1; // Clear Overflow flag
SciaRegs.SCIFFRX.bit.RXFFINTCLR=1; // Clear Interrupt flag
PieCtrlRegs.PIEACK.all|=M_INT9; // Issue PIE ack
}
