Part Number: TMDSCNCD28388D
Other Parts Discussed in Thread: TMS320F28388D, TMDXIDDK379D, DESIGNDRIVE, C2000WARE, LP-AM243, TIDEP-01032, TMDSCNCD263P, TIDM-02006, MCU-PLUS-SDK-AM263X,
Hello TI Experts,
My name is Eric Kang, an Application Engineer at MathWorks Korea, focusing on motor control and electrification.
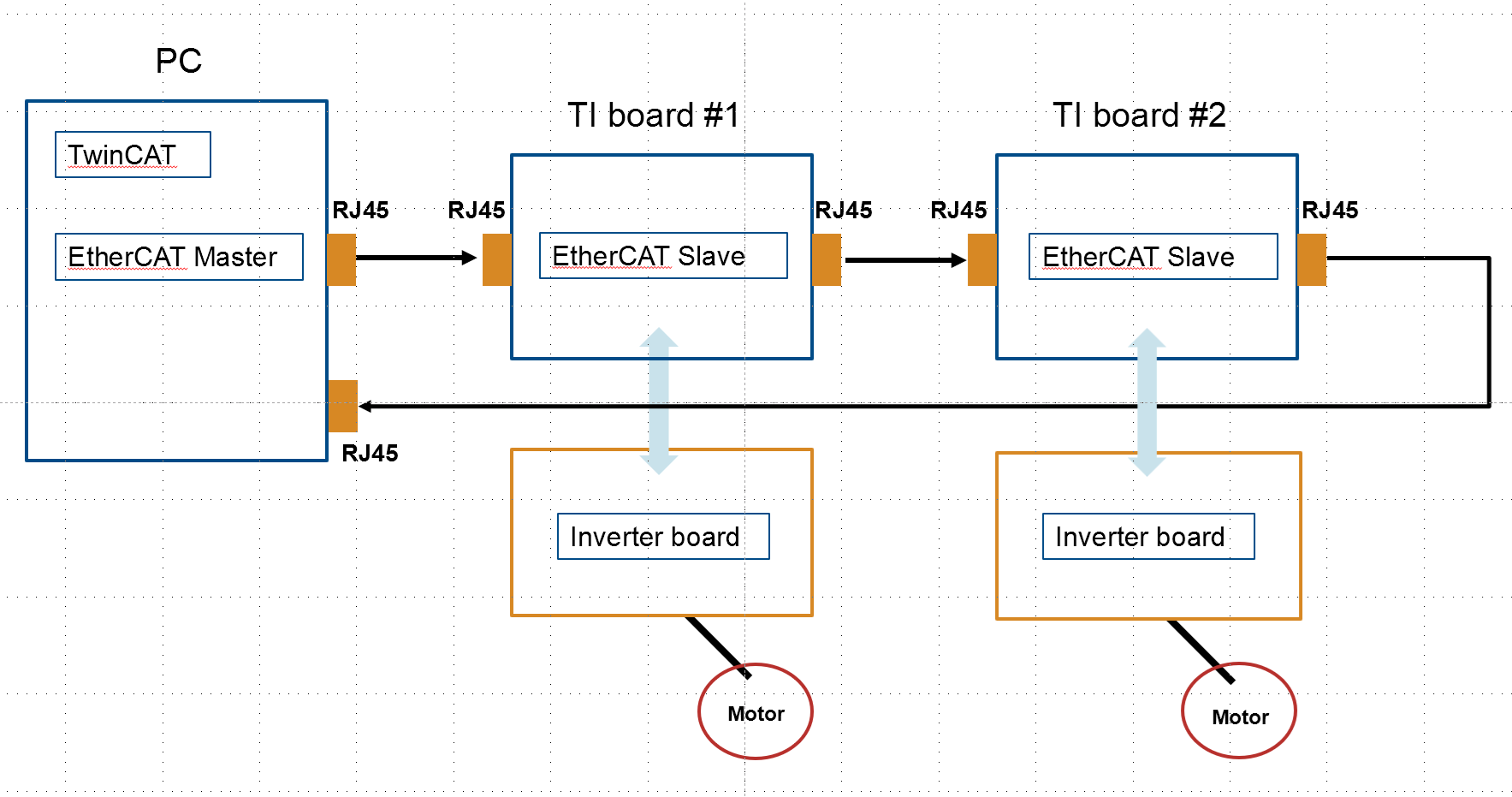
We are planning to build a demonstration of EtherCAT-based multi-motor control using TI hardware, intended for technical demo purposes (exhibitions or seminars).
We have an initial system concept where multiple motor-control nodes are connected via EtherCAT (see attached diagram), and we would appreciate advice on the following:
- Whether this system configuration can be realized using TI devices, and which MCU/SoC or evaluation boards are recommended
- Recommended TI boards for EtherCAT-based motor control, especially for multi-motor or multi-axis systems
- Any additional required hardware (e.g., EtherCAT interface, communication expansion boards)
- Relevant documentation or reference designs for EtherCAT-based motor control
- Recommended support or contact points for deeper technical guidance
This demo aims to showcase an EtherCAT-based multi-motor control architecture using TI hardware together with MathWorks tools.
Thank you for your support.