Part Number: TMS320F28P650DK
Other Parts Discussed in Thread: C2000WARE
Hi Experts,
while running pdi_hal example we are facing some register read related issues linked to optimization problem.
(Project : "C:\ti\c2000\C2000Ware_6_00_01_00\libraries\communications\Ethercat\f28p65x\examples\f28p65x_cpu1_pdi_hal_test_app" )
We found where the issue might be coming from and needed help to clarify and solve it further.
File : ethercat_subdevice_cpu1_hal.c
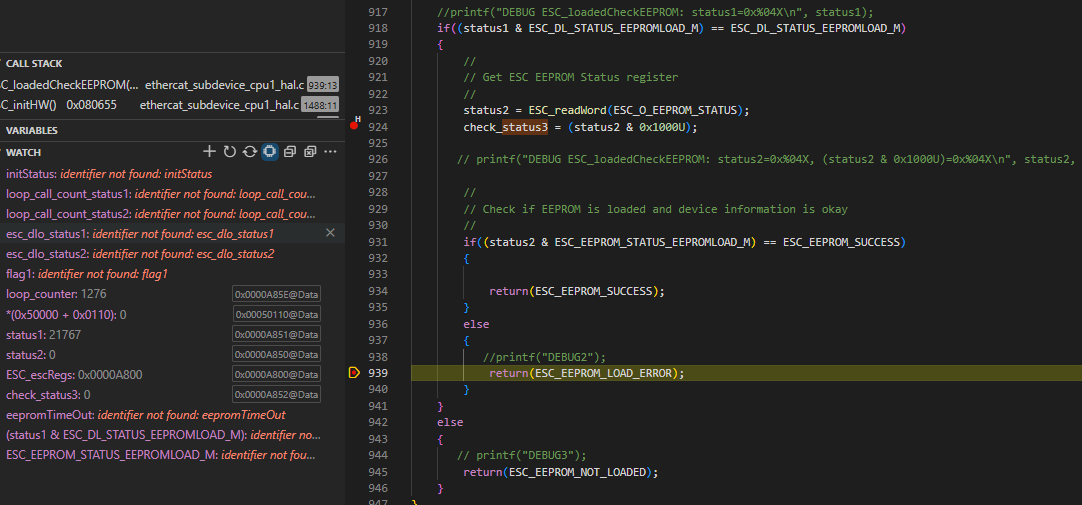
In "ESC_loadedCheckEEPROM" function we added breakpoint on line 921 and line 922 , when we use breakpoints to run we receive correct value 22037 but without breakpoint we are not getting correct value. We checked variables having "volatile" keyword.
We are checking for esc_dlo_status1 value in watch window.


Attaching asm files for both optimization
o2_ethercat_subdevice_cpu1_hal.asm
Can you please help in solving this issue ? Why are we are not getting value correctly when breakpoints are added vs when we didnt add breakpoint . What should be changed to get the values properly without adding breakpoints ?