


Hello TI,
I use eQEP unit in motor control application as position and speed sensor. I have connected an incremental sensor to QEPA, QEPB and QEPI to the TMS320F28335 DSP. Everything works fine but for speed 0.4pu I measure rotor position as in this picture:

and for speed 0.2pu I measure this rotor position
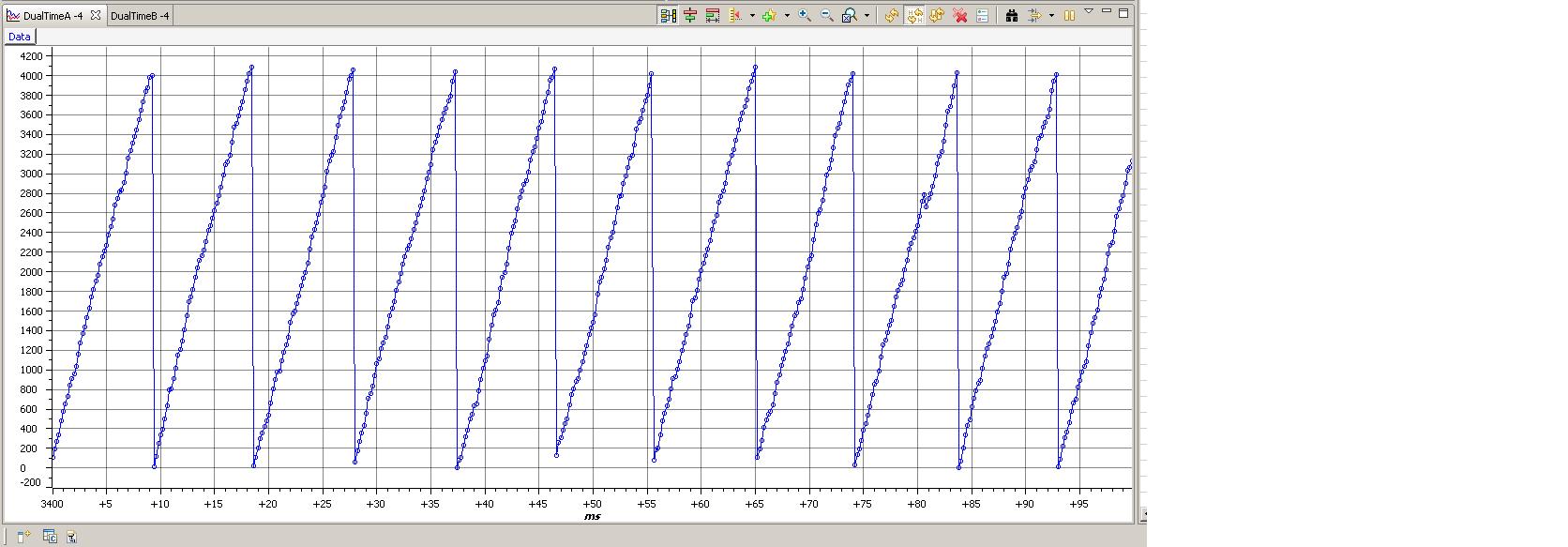
In the picture is depicted position register directly. We can see that slope is higher for speed 0.2 than for speed 0.4 so the speed position calculation from
eq. k*(theta(n)-theta(n-1)) is wrong. Where do I make mistake?
Thank you very much. Tom.
