


I wanted to implement an auto-baud detection mechanism as described in a CIA document "Automatic Baudrate Detection in CANopen Networks" in "Automatic Baud Detection.pdf".
As the C2000 series unfortunately do not implement a so called "listen only" mode, I tried to add additional hardware as figured out in the document mentioned above (with "Listen-Only" a common GPIO).
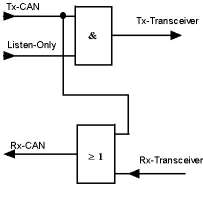
However, if this hardware add-on is in place, nothing works anymore, neither normal mode ("Listen only" = high) nor listen-only mode. In the document CIA says that "most CAN controllers use dominant = high (Tx-CAN, Rx-CAN) as default setup". Does TI follow this scheme or is it inverse? I couldn't reliably figure out from the eCAN documentation.
If I cut the connection between the AND and the OR gate, normal operation works fine (why shouldn't it). But in listen-only mode I get errors (Error passive, EPIF set) instead of receiving a message sent by another node.
Thanks for any hint.
Walter