


Hi,
I am doing a motor control application with 24 motors. Each motor is driven by a TMS320F38035 controller. All the controllers are networked with CAN. The configuration is as shown below.
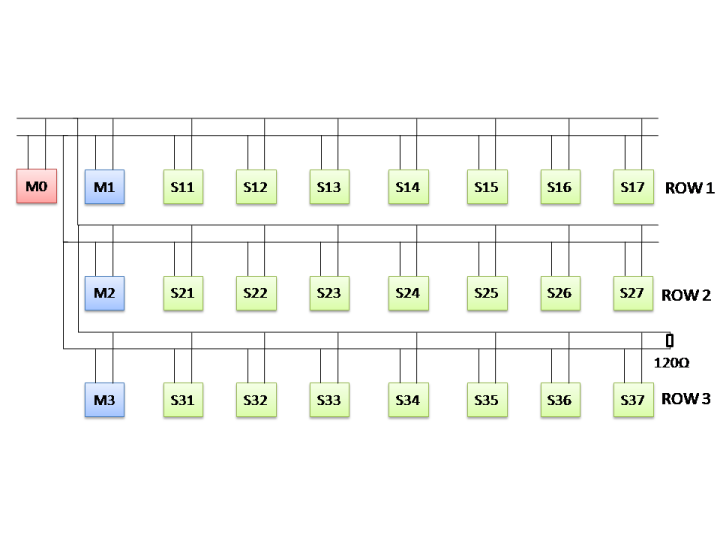
M0 is the control card and it is driving M1, M2 and M3. M1 is the master of S11 to S17 and M2 is the master of S21 to S27 and so on. For that I have configured three mailboxes in M0 for transmission. M1, M2 and M3 is configured with 8 mailboxes, 1 for reception (from M0) and 7 for transmission (for Sn1 to Sn7).
For the initial testing I started connecting with only one row at a time. When I connected only the first row, everything worked fine. M0 communicated with M1 and M1 communicated with S11 to S17. The same I repeated for the second and the third row.
In the next step, I connected two rows at a time. But when I connected the second row along with the first, there are some problems. M1 can communicate with S11 to S17 and M2 can communicate with S21 to S27 before turning on the M0. When M0 is switched on the communication stops. If I disconnect M2 from the network there is no problem. What could be the reason for this? Could someone identify what the problem is? It seems like when M0 communicates with M1 and M2 which are already the masters of their corresponding slaves, M0 could not send data to them. Is there any thing which I should consider when a controller is sending and receiving data at the same time via CAN?

