

Hello,
I had success to connect the motor TZA-01 (3~ 380V, 50Hz, 0.5kW, 1A, 1100 RPM) to TMDSHVMTRINSPIN and evaluated the InstaSPIN-MOTION. I followed the "QSG: Evaluating InstaSPIN-MOTION (F2806xM) using the Graphical User Interface". I did almost everything (except the Field Control & Modulation Tab). I was quite happy with the result (only I needed to face that DC fan attached to TMDSHVMTRINSPIN was really noisy - too noisy, I felt sorry about that but this was not my main problem).
Then I connected the other motor RG28S-4DK.4F.AL.
The motor identification was passed, but in SpinTAC 1:Startup, the status was always "Not Identified: 2004". I changed the Iq limit and also lower the speed, but the results were the same.
I did again the motor identification and then went to "SpinTAC 1:Startup", the results were the same.
What could be the problem? Why did it not pass this status?
The specification of the motor RG28S-4DK.4F.AL is:
3~ 400V, 50 Hz, 0.74kW, 1.4A, 1220 RPM
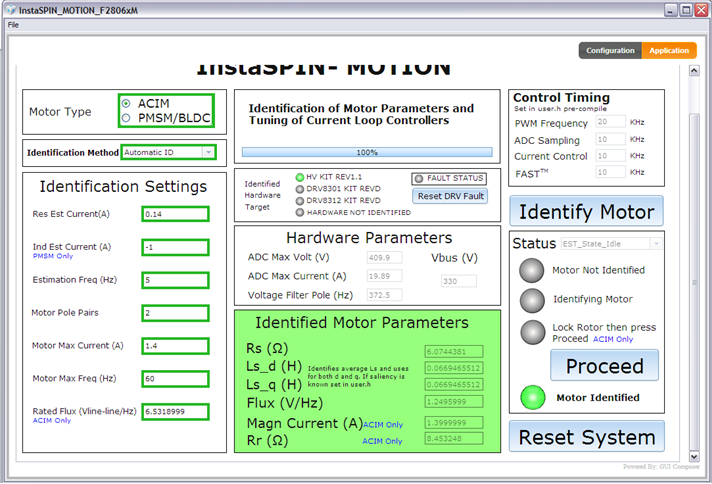
The results of "Motor Identification" can be seen below.

Thanks in advance!
Best regards,
Maria



