Hi,
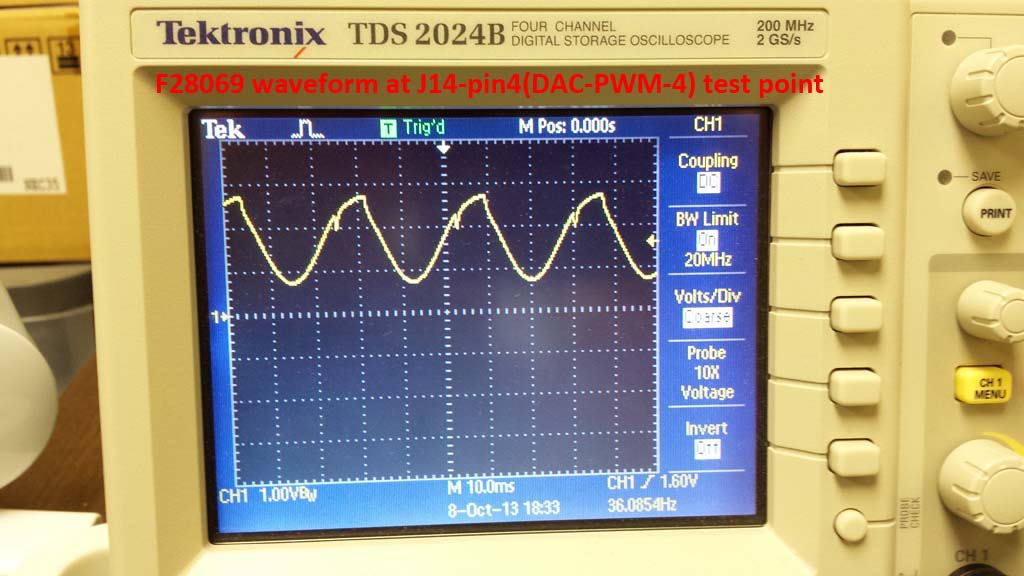
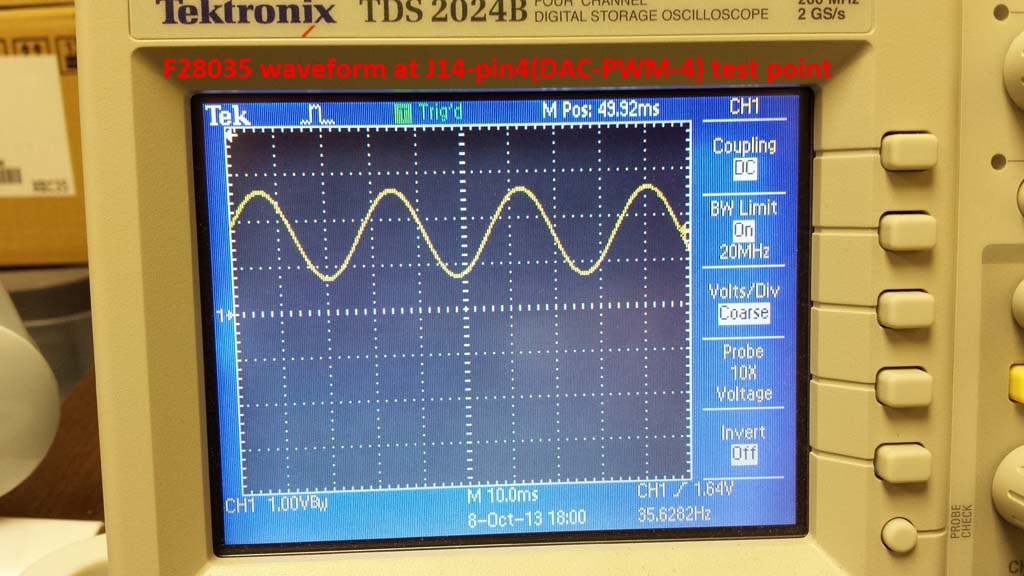
I am working on an ACIM VFD project with TMDSHVMTRPFCKIT + F28035 controlCARD now, however, my customer wants to use F28069 instead of F28035. Can anyone give me some suggestions on porting following HVMotorCtrl+PfcKit_v2.0 HVACI code from F28035 to F28069?
C:\ti\controlSUITE\development_kits\HVMotorCtrl+PfcKit_v2.0\HVACI_Sensorless
C:\ti\controlSUITE\development_kits\HVMotorCtrl+PfcKit_v2.0\HVACI_Scalar
C:\ti\controlSUITE\development_kits\HVMotorCtrl+PfcKit_v2.0\HVACI_Sensored
Thanks a lot.
Bill