- Ask a related questionWhat is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.
Hi All,
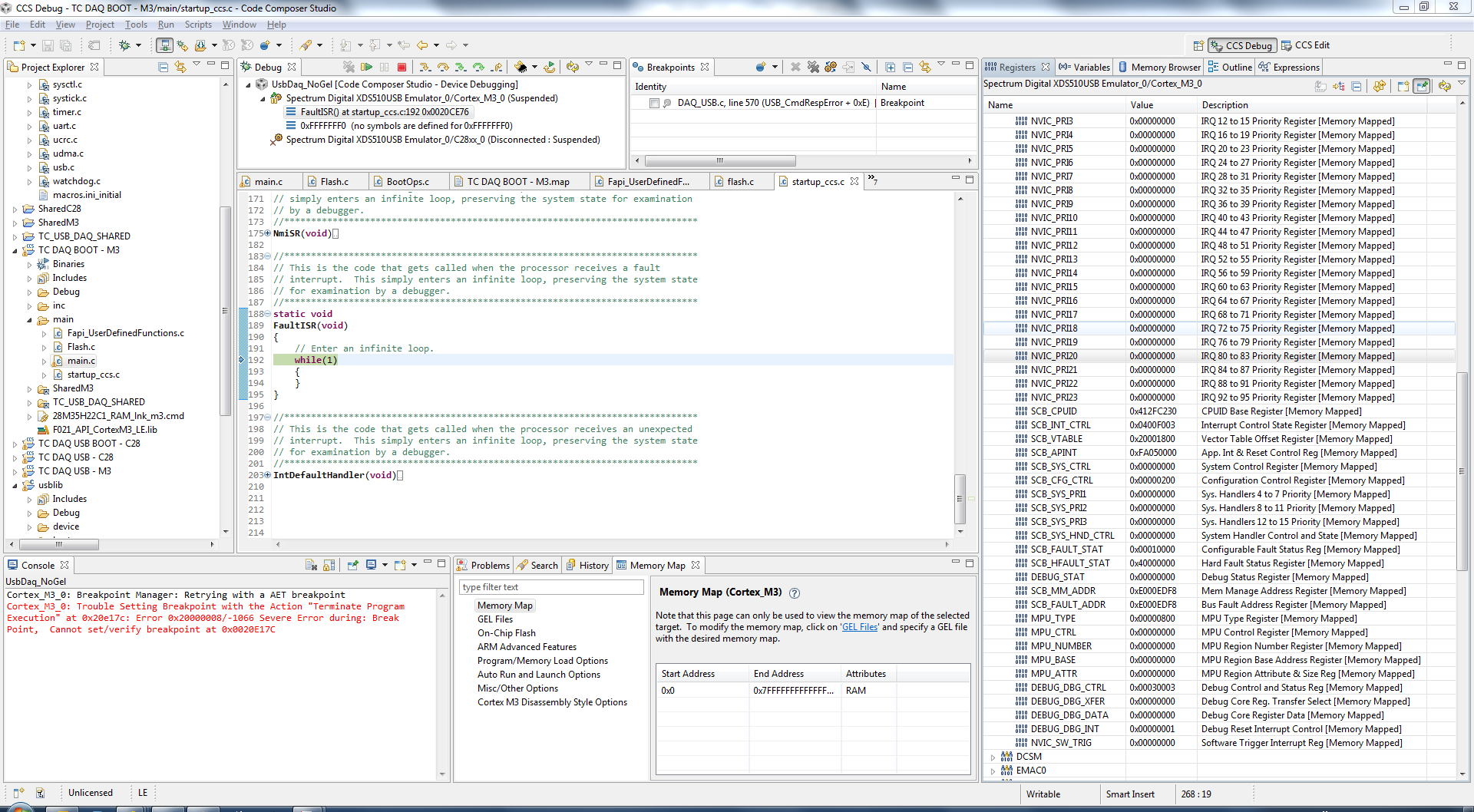
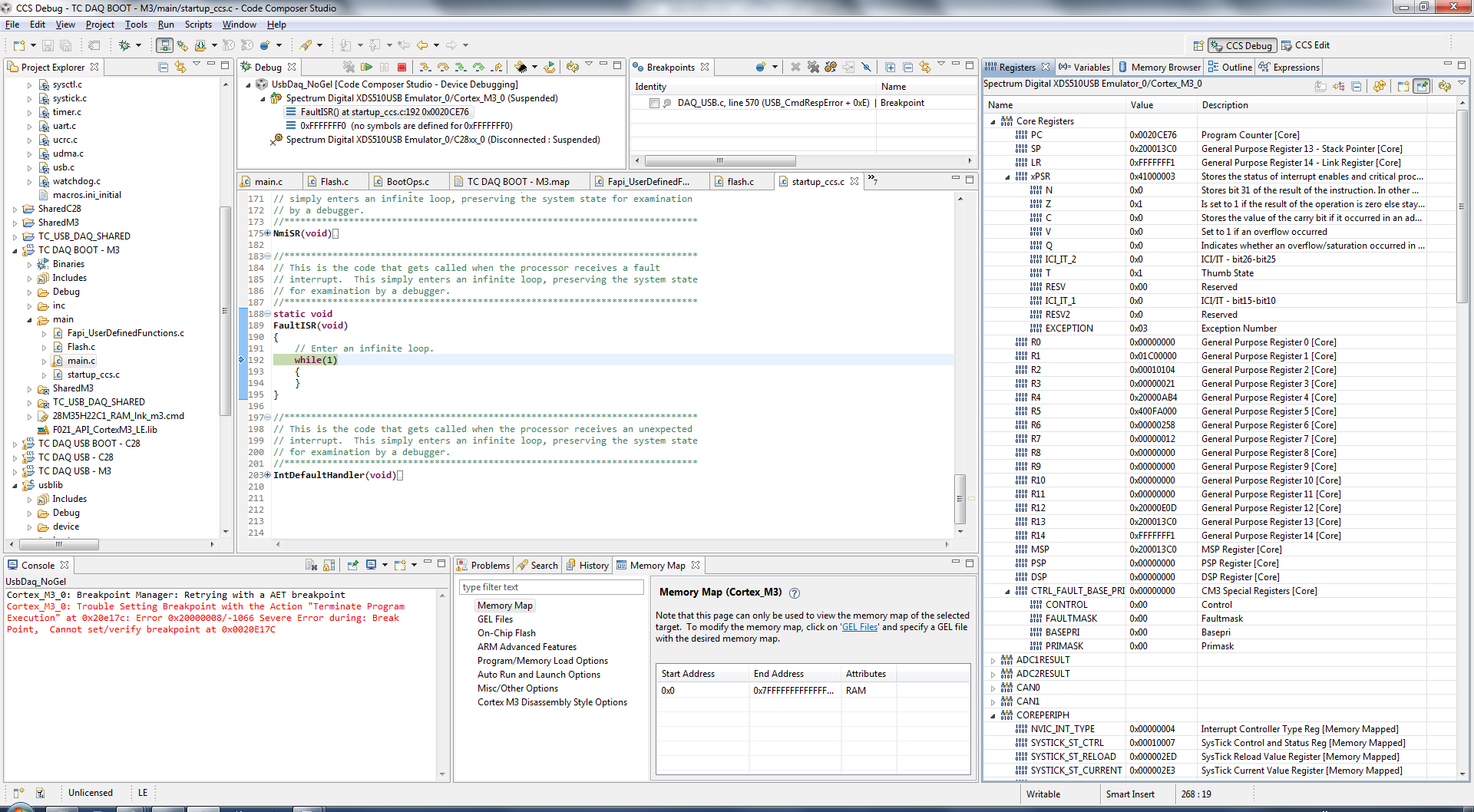
I would like to issue a software reset on the M3 and have the C28 and M3 both restart. I modified the blinky_dc example as a proof of concept, but it seems that only the M3 comes back from reset and hangs on IPCMtoCBootControlSystem(CBROM_MTOC_BOOTMODE_BOOT_FROM_FLASH);
Do I need to do something different to cause the c28 to come up correctly?
Thank you for your insights.