Hi guys,
When testing one custom system, I noticed following during the motor ID:
- Voltages and currents offsets calculated correctly
- Correct sensing (voltages corresponds, system voltage 20V, so after offset -10V is read)
- Rs calibration sets the correct current (1A), also checked with a multimeter
- When manually calculating Rs using the values for voltages and currents present in the system (graph tool), I get correct value for resistance (10.5 Ohm).
- gMotorVars->RsOhm shows values several magnitudes wrong (even 3E20 is possible to see)
Is some Q-value variable in the closed controller code overflowing? How can I check it?
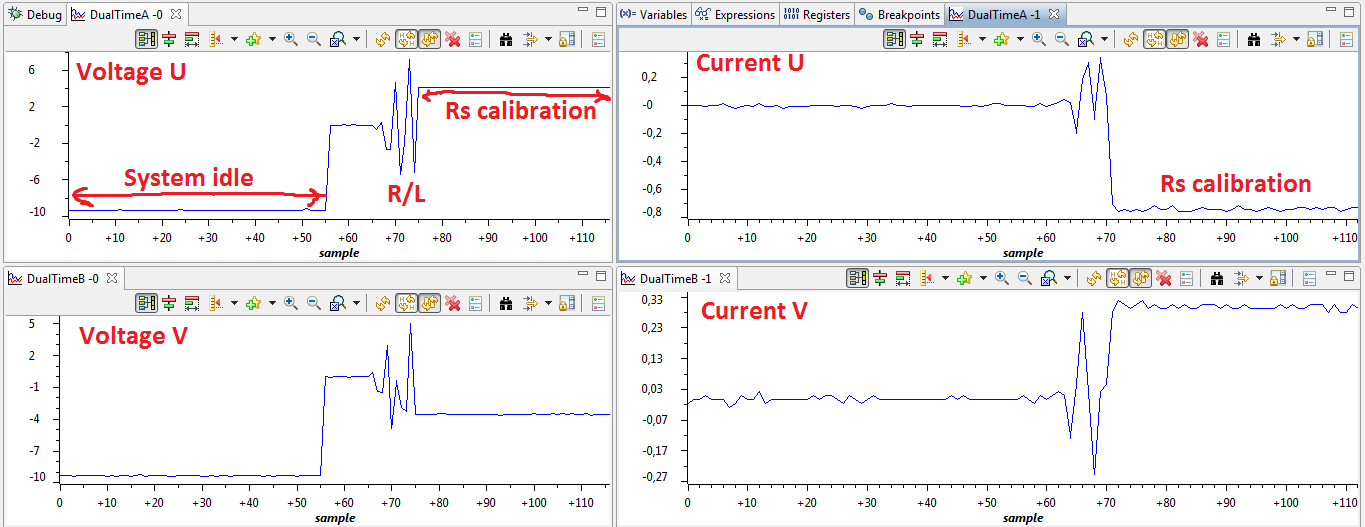
Graph in the attachment is in Volts/Amps, rescaled using Q24 for currents, Q20 for voltages (set appropriately in the graph view as well)