Other Parts Discussed in Thread: MOTORWARE
Hi,
I have some problem to estimate motor inertia in lab5c
**********************************************
#ifndef QEP
#define USER_IQ_FULL_SCALE_FREQ_Hz (800.0) // 800 Example with buffer for 8-pole 6 KRPM motor to be run to 10 KRPM with field weakening; Hz =(RPM * Poles) / 120
#else
#define USER_IQ_FULL_SCALE_FREQ_Hz (500.0) // 500 Example with buffer for 8-pole 6 KRPM motor to be run to 6 KRPM; Hz =(RPM * Poles) / 120
#endif
****************************************
How can i caclculate this variable. if I calculete with this number (6000*8)/120=400 # differente de 500 in programme.
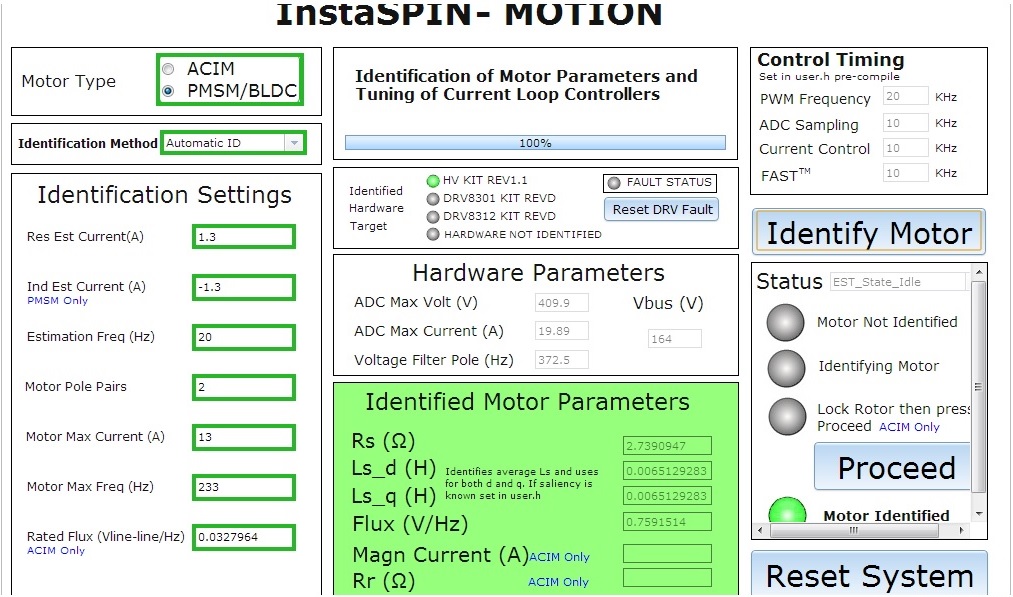
I have a Baldor Motor 4-poles max.speed=7000rpm, max.current=13A, how can'i calculate these two varibles?
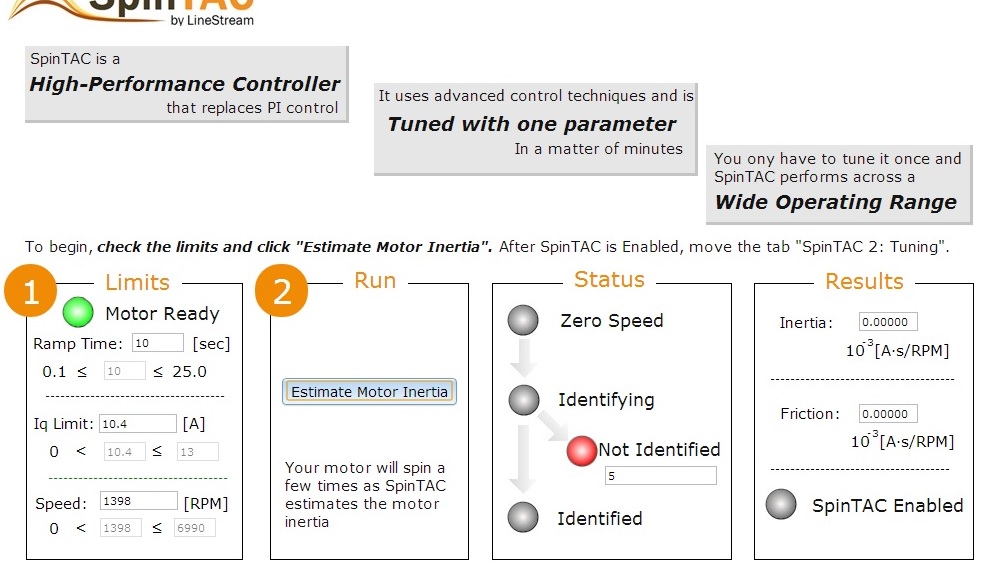
In other way, I tested the motorware to estimate motor inertia with GUI. The motor is identidied and I clique in Estimate Motor Inertia in SpinTAC1:Statup, and then, the statue is not identified=5.