Other Parts Discussed in Thread: MOTORWARE
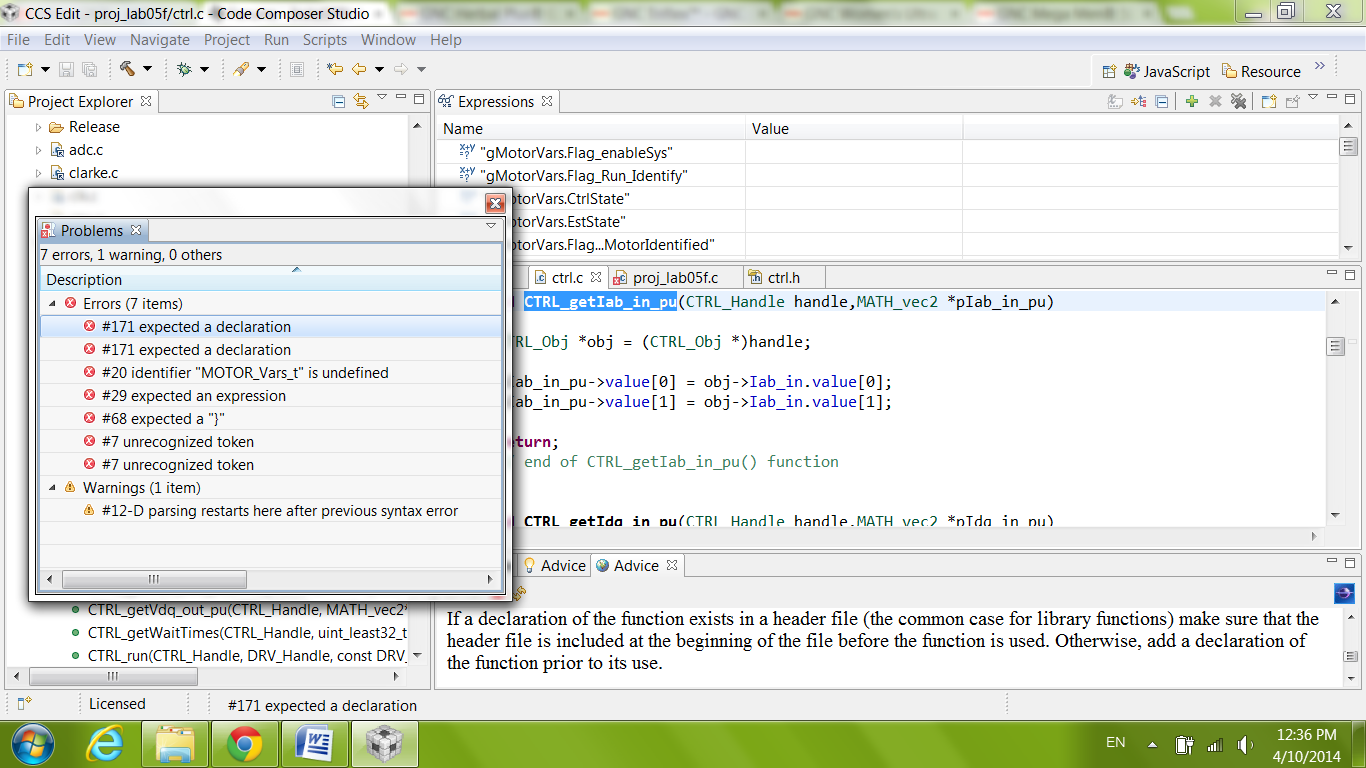
Hello, on page 81 of the lab manual, where we calculate Ki,series(PU)=(Rs/Ls)*Ti=0.01428, but, when i ran the program, gMotorVars.Ki_Idq=0.0428, which is exactly 3 times the value I calculated. I am lost, where did the "3" come from?
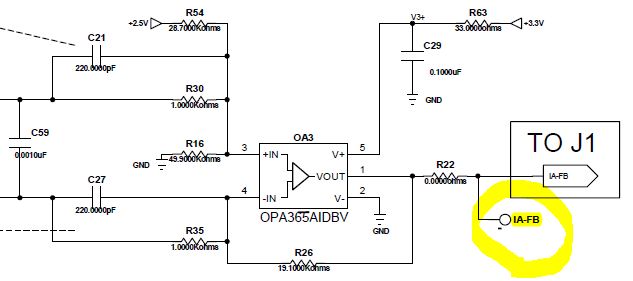
Another silly question. I would like to measure the currents on the test points using an oscilloscope. are the test points outputted from an A/D on the board? in other words, are they actually voltages that map current to volts? I do a lot of data acquisiton in my job, where (for example) 0-1 amp = 0-10 volts, where 1V=0.1A. how do i actually connect the oscilloscope? and the same for the PWM test points on the board. Please help, i need to monitor the currents for Lab 5a, and other labs.
Thank you