Hello
I have some problem with Lab12. The motor connected and encoder too (A,B), but the motor don't spin.
I verified the motor phase lines are correcte, The USER_MOTOR_ENCODER_LINES=2048ppr, also i verified the motor encoder lines connections are correcte
before this lab12 i do lab5c as mentioned.
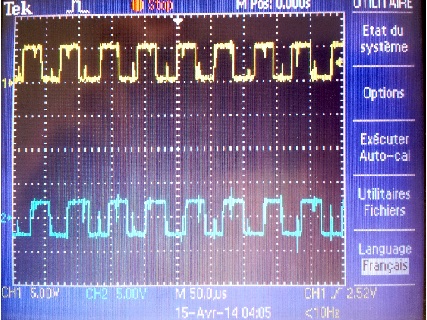
I have encoder output (A and B outputs) figure when the motor spin. There are some noise. is this noise can have effect?
.